
Autor: Mark Patrick, Mouser Electronics
El sector de la automoción está cambiando a pasos agigantados, y aún quedan muchos más cambios por llegar. Estamos comenzando a aplicar la energía eléctrica y a confiar en los sistemas avanzados de asistencia al conductor (ADAS, por sus siglas en inglés), pero ¿qué nos depara el futuro? El siguiente paso es reemplazar el conductor, inicialmente solo bajo ciertas circunstancias para, posteriormente, reemplazarlo por completo. Este es un gran desafío técnico que dependerá en gran medida del aprendizaje automático (AA), pero también de una serie de preocupaciones sociales profundas.
Con un informe de la NHTSA que atribuye más del 90 % del total de accidentes de tráfico al conductor, las organizaciones de seguridad vial están muy interesadas en que esto suceda rápidamente, ya que creen que la conducción autónoma reducirá drásticamente las muertes en la carretera. Inicialmente, los vehículos autónomos compartirán la carretera con vehículos conducidos por humanos, pero con el tiempo todos los vehículos serán autónomos y confiarán en sensores y sistemas de comunicación entre vehículos para tomar buenas decisiones. De hecho, esta comunicación V2V entre vehículos cambiará las reglas del juego, ya que permitirá a los vehículos no solo comunicar sus intenciones y advertir de ellas, sino también compartir su experiencia para ofrecer un entorno de conducción más seguro.
La cantidad de datos que se recopilarán como resultado de esta comunicación es casi inconcebible. Tesla ya ha comenzado a recopilar datos para respaldar el desarrollo continuo de sus sistemas autónomos. Sin embargo, la recopilación a gran escala plantea varias preguntas (aún sin respuesta) relacionadas con la privacidad, el consentimiento y la autorización para procesar los datos.
Desarrollo de inteligencia de conducción
Los accidentes que involucran vehículos autónomos son relativamente poco frecuentes, lo cual es bueno para los usuarios de la carretera, pero representa un desafío para los científicos de datos que necesitan datos para saber cómo ocurren los accidentes, con el fin de que los vehículos autónomos puedan preverlos y evitarlos.Investigadores de la Universidad de Saarland en Alemania han utilizado simulaciones para entrenar a los sistemas AA, ideando un método que funciona sin provocar ningún accidente real. Su entrenamiento basado en la simulación presenta posibles escenarios de accidente y otros eventos para que los sistemas de conducción autónoma los aborden.
A medida que los vehículos dependan más de sus sensores, cada vez será más importante para estos identificar uno o más fallos y, a continuación, saber manejar la situación (ya sea conduciendo en un modo de «marcha de emergencia» o deteniendo el vehículo).
Al registrar datos del mundo real que se abstraen hasta un nivel en el que se anonimizan, el aprendizaje puede progresar más rápido y satisfacer la necesidad de privacidad. Sin embargo, uno de los requisitos previos seguirá siendo un marco legal claro y un acuerdo entre los operadores y fabricantes de vehículos.
Cambio de las percepciones
El camino hacia los vehículos autónomos comenzó con ADAS, donde el vehículo empezó a controlarse a sí mismo, un paso clave hacia la autonomía vial. Si bien algunos están preocupados por la privacidad y la fiabilidad de la tecnología, a muchos más les inquietan las carreteras llenas de vehículos autónomos.
Los desafíos asociados con el panorama de la industria de la automoción en constante cambio distan mucho de ser puramente técnicos. La forma en que usamos e incluso tenemos en propiedad los vehículos está a punto de cambiar. Los vehículos son bienes caros, cuyos precios siguen subiendo debido a la tecnología más avanzada y las baterías más grandes, pero a menudo pasan más tiempo parados que en uso.
Los nuevos conceptos de transporte, como la movilidad como servicio (MaaS), prometen eliminar la necesidad de poseer un vehículo privado. De hecho, los vehículos autónomos bajo demanda plantean cuestiones importantes sobre la propiedad y el funcionamiento de estos vehículos en el futuro.
Comportamiento inteligente de los vehículos
La capacidad de los vehículos para comunicarse entre sí y con su entorno comportará muchos beneficios, incluida una mayor seguridad, menos tráfico y menos contaminación gracias a la notificación de problemas o atascos temporales, y la consecuente búsqueda de rutas alternativas.
La mayoría de los conductores muestran un buen comportamiento en la carretera, adaptándolo a las condiciones y la ubicación de esta, ya sea rural o urbana. Las redes neuronales pueden determinar fácilmente datos como la posición, la velocidad y el sentido de marcha, pero tienen dificultades a la hora de predecir lo que puede suceder a continuación. Los conductores humanos saben que en situaciones como la conducción urbana es necesario calcular el riesgo.
Algunos conductores humanos son educados, pero el comportamiento de conducción puede variar según la ubicación o la nacionalidad, por lo que los vehículos autónomos deben evaluar las situaciones y conducir en consecuencia.
Pasos clave hacia la autonomía
Desde hace muchos años, los fabricantes de automóviles, así como las organizaciones de seguridad vial nacionales e internacionales, se han esforzado por conseguir vehículos totalmente autónomos. Si los retos fueran puramente técnicos, probablemente ya los habríamos superado. Sin embargo, eliminar al conductor humano plantea complicaciones legales para las aseguradoras, lo que impone una mayor responsabilidad a los desarrolladores de algoritmos y, en última instancia, al fabricante del vehículo. Cuestiones como esta, así como la preocupación de la sociedad por los cambios profundos, están obstaculizando el progreso. Aun así, debemos superar todos los desafíos, ya que las carreteras están cada vez más concurridas y existen pruebas irrefutables de que los humanos siguen siendo la causa de la mayoría de los accidentes.

Figura 2: Trabajar en movimiento desde un vehículo autónomo.(Fuente: Mouser Electronics)
SAE International, anteriormente conocida como Society of Automotive Engineers, ha definido seis niveles de autonomía de los vehículos (figura 3), que pretenden servir de referencia para el desarrollo de sistemas de vehículos autónomos. Los tres primeros niveles, del nivel 0 (asistencia momentánea) al nivel 2 (asistencia colaborativa e integrada), ya existen en muchos sistemas ADAS que alertan o asisten a los conductores humanos. Ejemplos de ello son el control de crucero adaptativo (ACC), la detección de puntos ciegos, la guía y aviso de salida de carril, la iluminación adaptativa, el frenado de emergencia, el reconocimiento de señales de tráfico y muchos más. La cantidad de funciones ADAS instaladas dependerá de la marca del vehículo y de las opciones seleccionadas cuando se compre nuevo. Hasta el nivel SAE 2, el conductor sigue siendo responsable del control general del vehículo, incluso aunque algunas funciones de ADAS parezcan ofrecer una autonomía parcial.
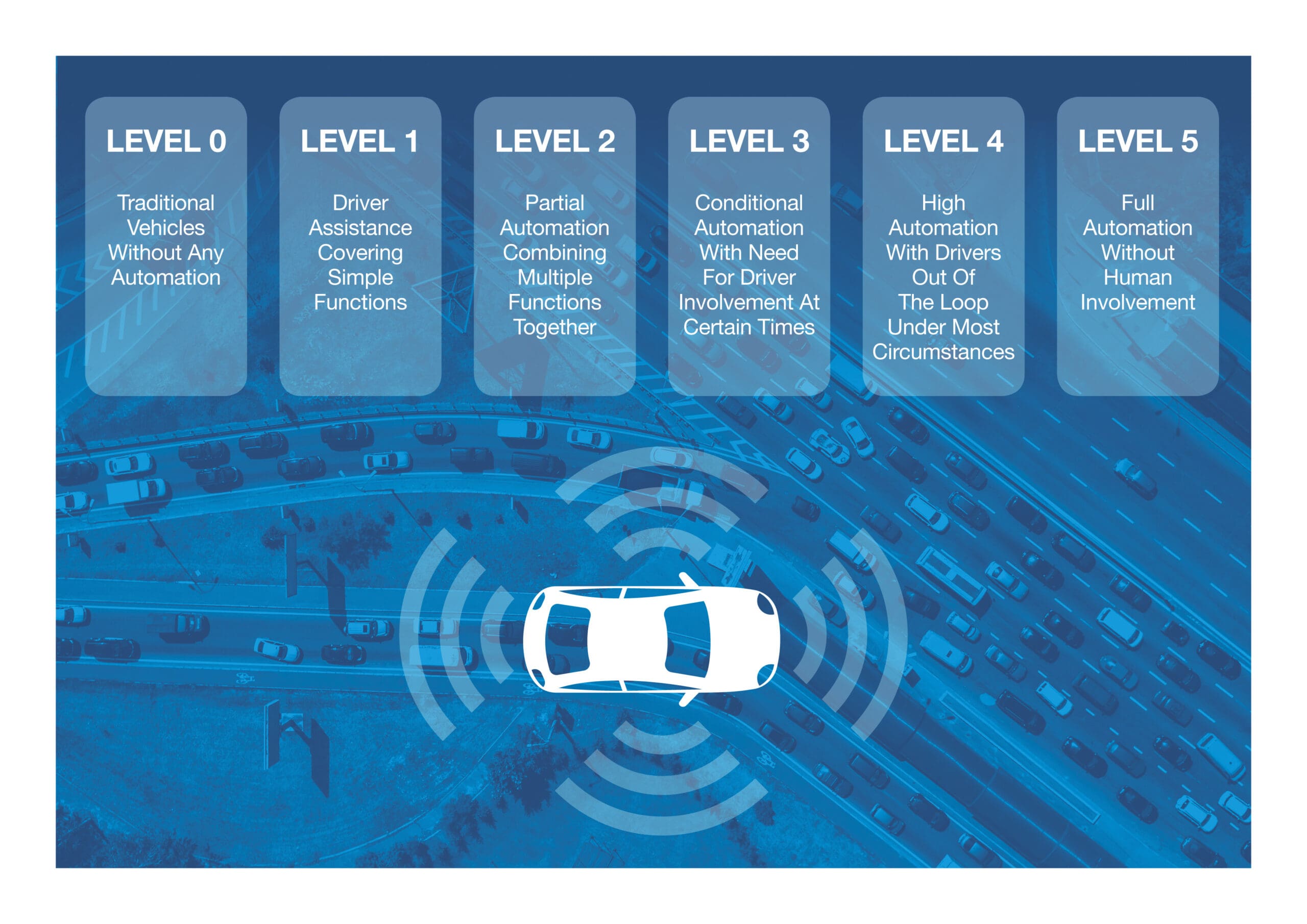
Figura 3: Niveles de SAE International para la autonomía en la conducción.(Fuente: Mouser Electronics)
Si subimos al nivel 3, las funciones ADAS están integradas y pueden colaborar, pero el conductor sigue estando al mando. Esto requiere que esté alerta, atento a posibles peligros y preparado para retomar el control total cuando sea necesario.
De ADAS a la autonomía
A partir del nivel 3 se supone que el vehículo tiene total autonomía. En el nivel 3, el sistema dispone de un modo de emergencia, ya que puede pedirle al conductor que retome el control del vehículo. Si avanzamos al nivel 4 y nivel 5, no se prevé que haya conductor humano y, a menudo, el vehículo no dispone de pedales ni de volante. Mientras que el nivel 4 ofrece autonomía en algunas situaciones (p. ej., conducción por carretera), en el nivel 5 el vehículo es autónomo bajo todas las condiciones.
Sin embargo, la tecnología requerida para pasar al nivel 3 y superiores es significativa y se necesitan más estándares de comunicación e infraestructura, además de la cooperación entre los fabricantes de vehículos. En este aspecto, se está avanzando: Mercedes-Benz ahora ha incorporado un sistema Drive Pilot de nivel 3 en su nueva Clase S, que se puede usar en más de 13 000 km de carreteras alemanas a velocidades de hasta 60 km/h.
La importancia de la detección para la conducción autónoma
Para que un vehículo pueda navegar y conducirse solo, debe ser al menos tan consciente de su entorno como lo sería un conductor humano; de lo contrario, básicamente no es viable. Para poder «ver», se utilizan sensores para detectar cualquier objeto y sus posiciones en relación con el vehículo, así como sus velocidades y trayectorias. Además, los algoritmos deben procesar esta información recibida para determinar si el objeto es otro automóvil, una señal de tráfico, un peatón u otra cosa. Si bien los sistemas ADAS poseen parte de esta capacidad, se requieren sensores y un procesamiento de datos más sofisticados para poder lograr la autonomía total.
Los vehículos autónomos incorporan múltiples sensores y sistemas de detección (figura 4), como sistemas de radar, LiDAR y vídeo, para determinar si la carretera está libre de obstáculos. Estos sistemas también toman decisiones cuando los accidentes son inevitables y pueden provocar víctimas. Sin embargo, delegar la responsabilidad de la vida humana a las redes neuronales es un campo jurídico complicado. Aunque esta tecnología hará que las carreteras sean más seguras y salvará vidas al seguir un marco de seguridad definido por humanos, la idea de que los algoritmos tomen tales decisiones ha generado una gran preocupación entre muchas personas.
El sistema de radar se encuentra en varias funciones ADAS, como el frenado de emergencia automático (AEB) y el control de crucero adaptativo (ACC), y se puede usar para el estacionamiento automático, el cambio de carril en la autopista y en caso de tráfico lento. El radar moderno funciona en longitudes de onda milimétricas (mmWave), con una frecuencia de alrededor de 77 GHz. El radar es fiable y detecta rápidamente el alcance y la velocidad de los objetos independientemente de las condiciones climáticas.
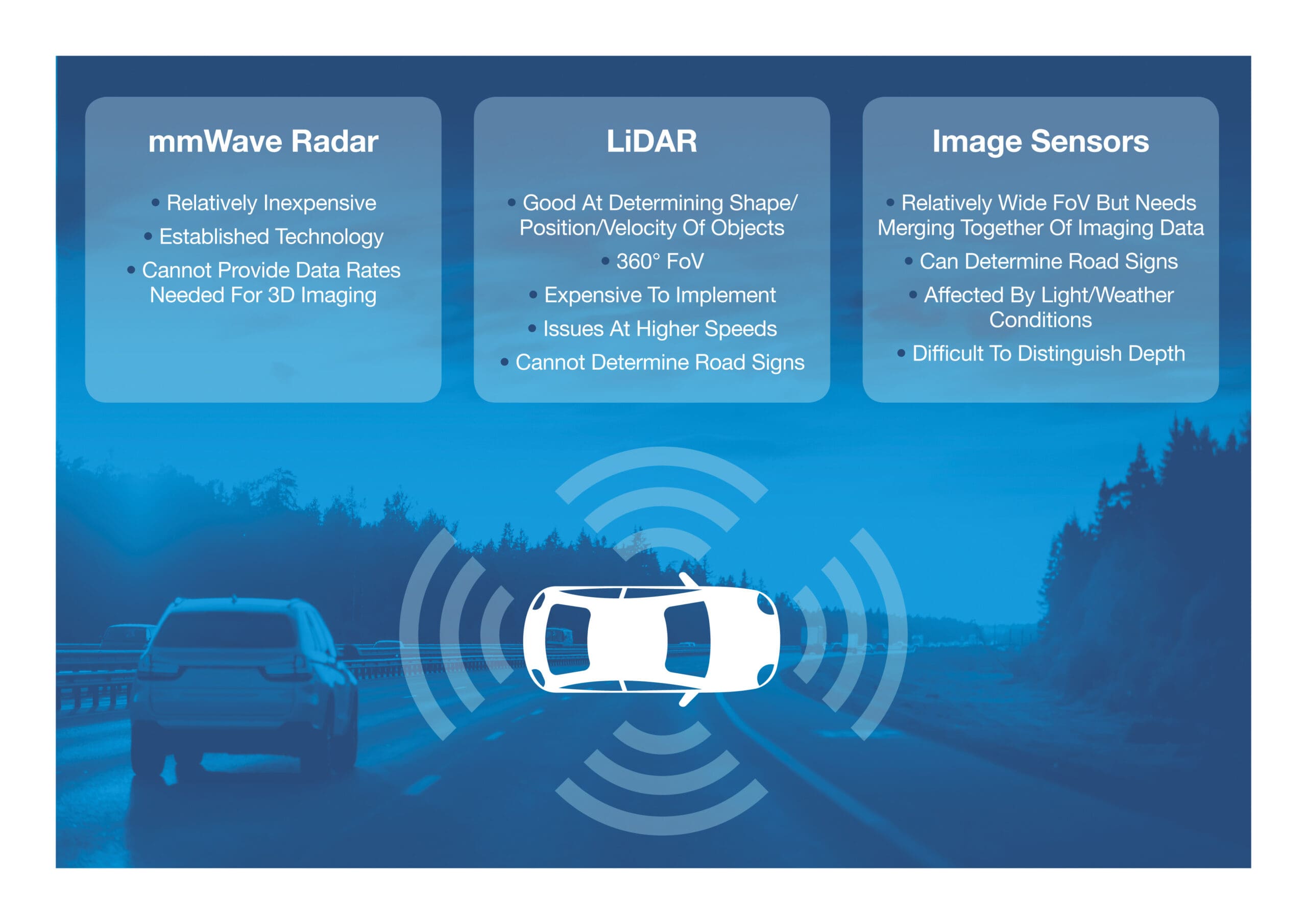
Figura 4: Los vehículos autónomos utilizarán múltiples tecnologías de detección.(Fuente: Mouser Electronics)
El sistema LiDAR se puede considerar una forma de radar basado en luz láser que es capaz de escanear en 3D para crear un mapa virtual del entorno alrededor del vehículo. En realidad, LiDAR es un sistema complementario al radar; cada tecnología se adapta a aplicaciones específicas.
Si bien LiDAR y el radar son capaces de resolver muchas tareas juntos, algunas de ellas requieren el análisis de imágenes (por ejemplo, se requieren cámaras de alta definición para reconocer las señales de tráfico). La colocación de múltiples cámaras de ángulo amplio alrededor del vehículo crea una vista de 360 grados en tiempo real que elimina los puntos ciegos. La combinación de esta vista con el LiDAR y el radar proporciona una conciencia del entorno muy completa que permitirá a los vehículos pasar a los niveles más altos del modelo SAE.
La inteligencia de datos como ayuda para la detección
Si bien los sensores modernos pueden proporcionar una buena imagen del entorno inmediato, esto se puede mejorar con información de otros vehículos cercanos y una infraestructura inteligente. Estos sistemas inalámbricos se conocen como vehículo a vehículo (V2V) y vehículo a infraestructura (V2I), y ambos requieren altas velocidades de transferencia síncrona con baja latencia y una excelente seguridad de datos. En este aspecto, los protocolos aún no se han confirmado, pero las opciones más probables son las comunicaciones de corto alcance específicas, basadas en Wi-Fi® 5, como IEEE 802.11p, o la comunicación celular vehículo a todo (C-V2X), utilizando la red celular 5G. Aunque ambos protocolos usan el espectro de 5,9 GHz, no hay interoperabilidad.
A falta de claridad, algunos fabricantes de automóviles han tomado una decisión unilateral, mientras que los proveedores de semiconductores, que reflejan el largo plazo del desarrollo, han «asegurado sus apuestas» desarrollando conjuntos de chips para ambos protocolos. No obstante, actualmente, dado que C-V2X requiere que 5G esté implementado por completo, existe el riesgo de demora, lo que hace que DSRC sea una opción habitual.
Si se comparan los dos enfoques, DSRC parece técnicamente el más fuerte, con un alcance de 300 m, altas velocidades de transmisión de datos y una latencia de 5 ms.El sistema ha sido adoptado en varios países, como Japón, Austria y Alemania.Fue adoptado en los EE. UU., pero los problemas de seguridad hicieron que posteriormente se cambiara a C-V2X.
La mayor ventaja de C-V2X es que utilizará la red 5G, lo que reducirá significativamente los costes y se beneficiará de futuros desarrollos, como velocidades de hasta 10 Gbps. También habrá la posibilidad de garantizar que los datos V2X se prioricen para lograr una baja latencia. Lo que más preocupa es el momento de la implementación completa del 5G y la calidad de la cobertura en las zonas rurales.
Decisiones y responsabilidades
Si bien los vehículos totalmente autónomos aportan muchas ventajas, existen dilemas éticos y morales que los consumidores, los legisladores, las aseguradoras y los fabricantes de vehículos deben abordar. Incluso durante la fase de prueba, se han producido varias muertes con vehículos autónomos en los que los algoritmos de detección no han reconocido un accidente inminente o no han detectado otro vehículo en las proximidades.
Como humanos, tomamos decisiones en los segundos previos a un accidente, por ejemplo, conducir el coche hacia donde dañará a la menor cantidad de personas, una decisión tomada por instinto en una fracción de segundo sin tiempo para analizar profundamente la situación. Sin embargo, una vez que los vehículos sean completamente autónomos, esta elección la hará el vehículo y será necesario desarrollar un algoritmo. Esto crea un campo jurídico complicado que se vuelve más complejo a medida que las actitudes frente a las acciones que los humanos pueden tomar también varían según la región, como se señaló en un artículo en la revista Nature (figura 5).
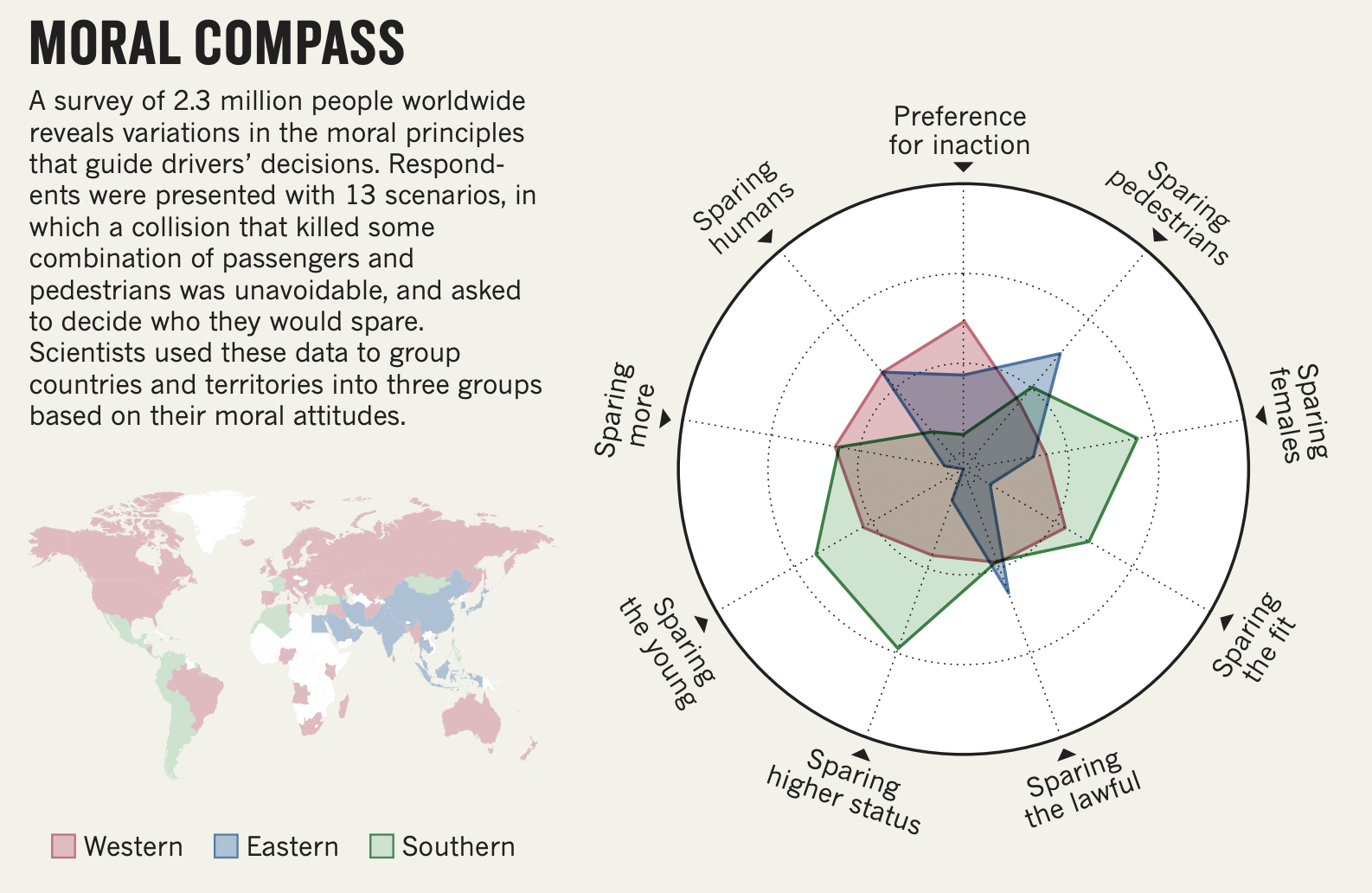
Figura 5: Brújula moral de los conductores creada a partir de una encuesta mundial. (Fuente: Nature)
Con vehículos totalmente autónomos del nivel SAE 4 y 5, no hay conductor ni ningún método de intervención del pasajero, por lo que los accidentes no se pueden atribuir a nadie que viaje dentro del vehículo. La culpa debe recaer en el fabricante del automóvil, el desarrollador de los algoritmos, los fabricantes de sensores o, quizás, un conductor humano de otro vehículo. En el nivel 3, la situación es menos clara ya que el conductor designado podría no haber tenido tiempo suficiente para reaccionar o no haber podido evitar un accidente provocado por los sistemas automáticos. En estos casos, los registros de datos de la «caja negra» (obligatorios en California) tendrán un valor incalculable para atribuir la responsabilidad.
Resumen
No cabe duda de que los vehículos autónomos son parte del futuro, a pesar de los muchos desafíos que deben superarse para hacer realidad esta visión. De alguna manera, los desafíos técnicos son un obstáculo menor y estamos bien encaminados para resolverlos. No obstante, las decisiones éticas o morales que deben tomarse e implementarse en los algoritmos pueden generar controversia durante algún tiempo.
Claramente, existe una motivación significativa para continuar el camino hacia los vehículos autónomos, ya que inevitablemente harán que las carreteras sean más seguras y ayudarán a reducir los atascos y la contaminación.





