Detección de la dirección con Bluetooth: llega la próxima generación de aplicaciones de posicionamiento en espacios interiores
Figura 1: Conociendo el ángulo de las señales que llegan a tres puntos de anclaje fijos y calculando dónde interseccionan se puede saber dónde se encuentra un dispositivo con un margen de un metro.
Erik Carlberg, Senior Product Manager, Estrategia de Productos de Radio de Corto Alcance, u-blox
Gracias a la tecnología GNSS (global navigation satellite system), muchos de nosotros tenemos la posibilidad de localizar un objeto o a una persona en el exterior. Los niveles de precisión que se pueden conseguir , especialmente si se utiliza un servicio de datos con aumentación GNSS, han permitido desarrollar aplicaciones verdaderamente innovadoras como vehículos autónomos y otros equipos.
Habiendo presenciado los logros conseguidos por esta tecnología en el exterior, existe un creciente interés por crear aplicaciones igual de revolucionarias en los espacios interiores.
Un ejemplo de ello es el seguimiento de alta precisión de activos en el ámbito de la industria y el consumo con el fin de encontrar un artículo determinado. Otro es la navegación en interiores que permite guiar a alguien o algo a través de instalaciones complejas, como un hospital o un gran nudo de transporte, mediante la navegación paso a paso. Una variación de este sistema podría mostrar la información en un dispositivo en movimiento cuando llega a un determinado punto de interés. Esto podría servir para el desarrollo de guías inteligentes, en un museo o una galería, capaces de proporcionar información sobre una obra expuesta cuando se acerca una persona.
Para ofrecer las experiencias de uso a las que aspiran sus diseñadores, estas aplicaciones exigen una combinación de posicionamiento muy exacto en el interior, de bajo consumo y costes asequibles. Esto no se puede lograr con las tecnologías de radio de corto alcance tradicionales.
Inconvenientes de las soluciones de posicionamiento convencionales basadas en Wi-Fi y Bluetooth
Wi-Fi Fingerprint, por ejemplo, solo ofrece una exactitud de unos 10m. Wi-Fi time-of-flight, también conocida como RTT (round-trip time) o 802.11mc, llega a 1-2m pero su consumo es muy elevado. Si bien se encuentra disponible desde hace algún tiempo, esta tecnología aún no ha sido desplegada sobre el terreno de forma significativa.
La localización de un dispositivo mediante Bluetooth ha utilizado tradicionalmente el indicador de intensidad de la señal recibida (received signal strength indicator, RSSI). A partir de RSSI es posible estimar la distancia entre una estación de referencia que sirve como “punto de anclaje” y un dispositivo, pero no en qué ángulo se encuentra el dispositivo respecto a dicho punto. Con tres o más puntos de anclaje se puede calcular la posición del dispositivo, sin embargo los niveles de exactitud tan solo alcanzan de 3 a 5 m.
Detección de la dirección con Bluetooth: el posicionamiento interior se hace granular
La versión 5.1 de la especificación Bluetooth introdujo la “detección de la dirección”. Esto representa un avance muy importante en cuanto a las capacidades de posicionamiento preciso en espacios interiores, hasta tal punto que promete ser la clave para el desarrollo de alguno de los productos y servicios más revolucionarios que tienen previsto crear los ingenieros actuales.
La detección de la dirección no se basa en la intensidad de la señal emitida por un dispositivo conectado a Bluetooth para conocer su localización. En lugar de esto, utiliza puntos de anclaje fijos con matrices multiantena para calcular el ángulo de la señal, bien sea mediante la técnica del ángulo de llegada (angle of arrival, AoA) o el ángulo de salida (angle of departure, AoD). Calculando los ángulos de las señales desde/hacia al menos tres puntos de anclaje, e identificando dónde interseccionan, se puede obtener la localización con un margen de un metro para los dispositivos cercanos.
Veamos brevemente cómo se calculan estos ángulos.
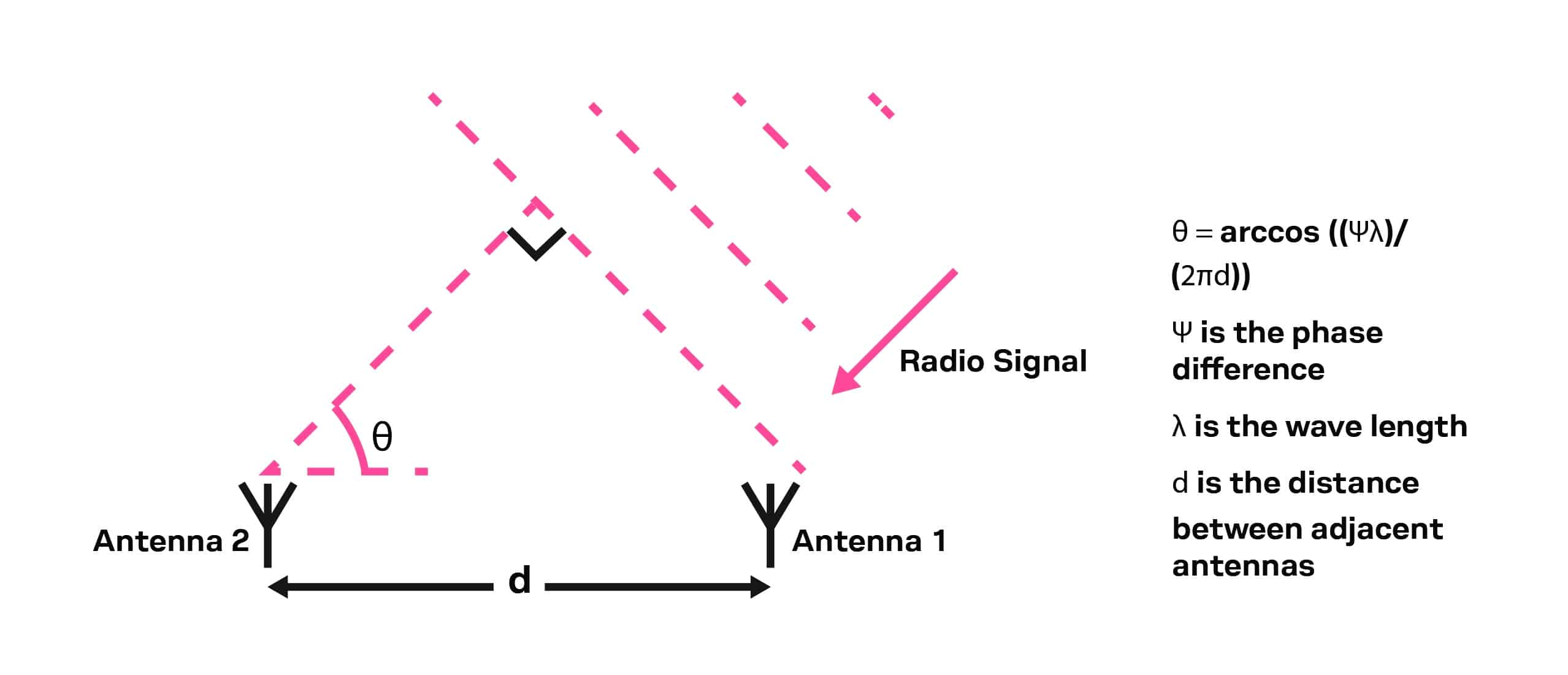
En una configuración AoA, un dispositivo móvil envía una señal para detección de la dirección con Bluetooth. Esta señal llega a cada antena en una matriz de puntos de anclaje con una ligera variación de fase respecto a otras antenas en ese punto de anclaje. Estas diferencias de fase se pueden utilizar para calcular el ángulo de llegada de la señal, suponiendo que la señal propaga una onda plana. El AoA se puede usar para el seguimiento o en servicios de localización en tiempo real (real-time location services, RTLS).
Figura 2: Una configuración AoA calcula el ángulo de una señal entrante de detección de la dirección con Bluetooth basada en ligeras diferencias de fase observadas en cada antena en una matriz multiantena.
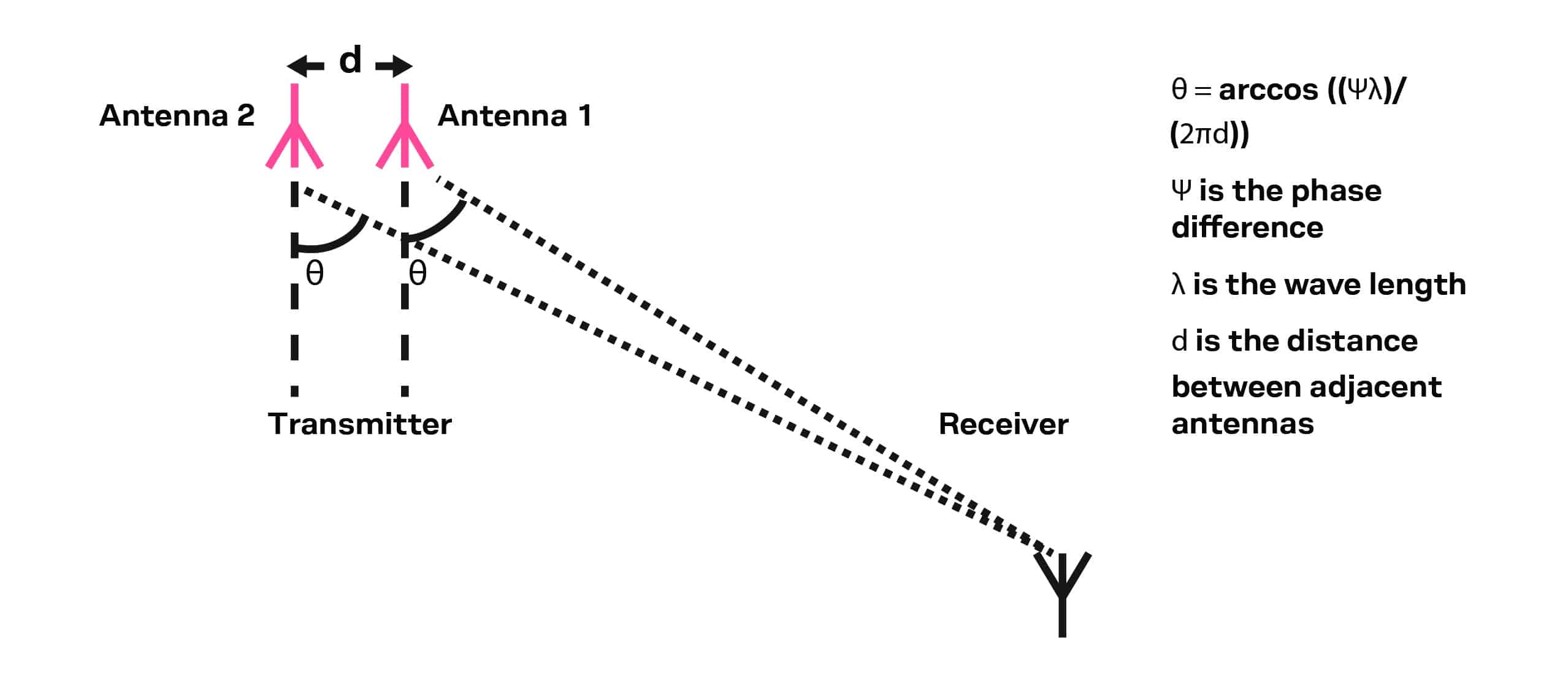
Con AoD, la señal se envía desde cada antena en un punto de anclaje hasta un dispositivo cercano conectado a Bluetooth. Estas señales llegan hasta ese dispositivo con una ligera variación de fase. Junto con la información sobre la geometría de las antenas, estas diferencias en la fase se pueden calcular el ángulo de llegada de la señal desde el anclaje. AoD es una manera efectiva de implementar soluciones de orientación y navegación.
Figura 3: En una configuración AoD el dispositivo receptor calcula el ángulo al cual la señal sale de la matriz de antenas, basándose en diferencias de fase entre las señales enviadas desde diferentes antenas.
Pruebas realizadas
Hemos probado a fondo la tecnología de detección de la dirección con Bluetooth 5.1 en una serie de casos prácticos. Un ejemplo reciente fue una prueba de concepto de AoA en la que utilizamos un servomecanismo para crear un cabezal rotatorio que girara para orientarse hacia el dispositivo móvil que estábamos siguiendo. Esto ofrecería una prueba visible de que la solución de detección de la dirección funcionaba.
El dispositivo móvil en esta configuración concreta fue una tarjeta de aplicación de u-blox que incorporaba un módulo Bluetooth 5.1 Low Energy NINA-B406. Su alcance se estableció en unos 10m, aunque se puede ampliar si es necesario.
En esta prueba de concepto contábamos con un solo punto de anclaje que incluía una tarjeta de antena u-blox con un módulo Bluetooth Low Energy NINA-B411 y nuestro software u-connectLocate (más adelante se hablará sobre él). La tarjeta de antena contiene cinco elementos de antena con polarización cruzada con el fin de determinar el ángulo de la señal entrante en los planos vertical y horizontal. El software instalado en la tarjeta calcula a continuación el ángulo de llegada. Esta información se utiliza luego para rotar el cabezal móvil y orientarlo hacia el dispositivo móvil en tiempo real. También realizamos numerosas pruebas en un almacén industrial, tal como describimos en nuestro artículo técnico sobre posicionamiento en espacios interiores.
Ayudando a los ingenieros a acortar el plazo de comercialización
Uno de los aspectos más complejos y que requieren más tiempo al crear soluciones basadas en AoA o AoD es la implementación de los algoritmos para calcular el ángulo de la señal a partir de las diferencias de fase, debido a la limitación de recursos inherente a los sistemas embebidos en los que suelen funcionar.
Por eso hemos desarrollado el software de detección de la dirección u-connectLocate para nuestros módulos NINA-B410 y B411. Este software proporciona una API que permite a los ingenieros obtener el AoA, gestionar la recogida de datos y el preprocesamiento, así como eliminar los componentes multirruta en cada antena. El software se ejecuta en un microcontrolador embebido en el módulo Bluetooth, lo cual significa que no se necesita procesamiento externo. Esto reduce la complejidad y la lista de materiales.
Tiempos apasionantes
Estos son tiempos verdaderamente apasionantes para quien trate de crear soluciones que requieran un posicionamiento muy preciso en espacios interiores. La detección de dirección con Bluetooth puede ofrecer una exactitud inferior a un metro que abre la puerta a innumerables aplicaciones. Por ende, tanto si trata de ayudar a las personas a orientarse en un hospital, a localizar con exactitud dónde se encuentra una pieza de maquinaria en un gran almacén o desarrollar una aplicación completamente distinta, la detección de la dirección con Bluetooth podría ser la tecnología disruptiva que necesitan.
Utilizamos cookies para optimizar nuestro sitio web y nuestro servicio.
Funcional
Siempre activo
El almacenamiento o acceso técnico es estrictamente necesario para el propósito legítimo de permitir el uso de un servicio específico explícitamente solicitado por el abonado o usuario, o con el único propósito de llevar a cabo la transmisión de una comunicación a través de una red de comunicaciones electrónicas.
Preferencias
El almacenamiento o acceso técnico es necesario para la finalidad legítima de almacenar preferencias no solicitadas por el abonado o usuario.
Estadísticas
El almacenamiento o acceso técnico que es utilizado exclusivamente con fines estadísticos.El almacenamiento o acceso técnico que se utiliza exclusivamente con fines estadísticos anónimos. Sin un requerimiento, el cumplimiento voluntario por parte de tu Proveedor de servicios de Internet, o los registros adicionales de un tercero, la información almacenada o recuperada sólo para este propósito no se puede utilizar para identificarte.
Marketing
El almacenamiento o acceso técnico es necesario para crear perfiles de usuario para enviar publicidad, o para rastrear al usuario en una web o en varias web con fines de marketing similares.