
Bahman Hadji, Director de Desarrollo del Negocio, División de Sensado en Automoción, onsemi
Es un hecho ampliamente reconocido que los sistemas avanzados de asistencia a la conducción (advanced driver assistance systems, ADAS) y la conducción autónoma (autonomous driving, AD) pueden funcionar gracias a la detección efectiva del entorno que rodea al vehículo con el fin de alimentar los algoritmos que permiten la navegación autónoma. La absoluta necesidad de una detección eficaz en situaciones donde está en juego la propia vida, exige utilizar varios tipos de sensores de manera que los datos se fusionen para complementarse y proporcionar redundancia. Esto permite aprovechar los puntos fuertes de cada tecnología y ofrecer una mejor solución en su conjunto.
Las tres modalidades de detección que serán más relevantes entre los sensores utilizados en los vehículos para ADAS y AD son los sensores de imagen, los de radar y los LiDAR. Cada uno de estos ellos ofrece sus propias ventajas, y juntos pueden formar un conjunto completo de sensores que suministren datos para que los algoritmos de percepción autónoma tomen decisiones a partir de la fusión de sensores, es decir, la capacidad de indicar el color, la intensidad, la velocidad y la profundidad para cada punto o elemento de la situación.

Figura 1: La fusión de sensores aprovecha los puntos fuertes de cada tipo de sensor para proporcionar una información completa sobre el entorno del vehículo.
Entre las principales modalidades, LiDAR es la tecnología más reciente en ser comercializada para su uso masivo en el mercado, si bien el concepto de usar la luz para medir la distancia se remonta a varias décadas. El mercado de LiDAR en automoción está llamado a crecer de manera espectacular desde los 39 millones de dólares de 2020 hasta los 1.750 millones de dólares previstos para 2025 (Yole Développement, 2020), impulsado por la proliferación de sistemas autónomos que requieren un completo conjunto de sensores. La oportunidad que se abre es tan grande que hay más de 100 empresas que trabajan en el ámbito de la tecnología LiDAR, y las inversiones totales de estas empresas superaron los 1.500 millones de dólares en 2020. Esta cifra es anterior a la avalancha de inversiones generadas por las SPAC por parte de algunas empresas especializadas en LiDAR a partir de finales de 2020. No obstante, dado que existen muchas empresas que trabajan con una sola tecnología, algunas de ellas con diferencias fundamentales como la longitud de onda utilizada (principalmente 905nm y 1550nm), es inevitable que finalmente haya una tecnología ganadora que se consolide, como hemos visto una y otra vez en otros casos, como Ethernet para las redes de datos o el VHS para vídeo.
Cuando se observa quiénes son los usuarios de la tecnología LiDAR – fabricantes de vehículos y empresas que diseñan y construyen vehículos robóticos autónomos destinados al transporte de personas y productos – el aspecto más importante desde su punto de vista son sus requisitos. En el fondo, estas empresas quieren suministradores que les proporcionen sensores LiDAR de bajo coste con un alto nivel de fiabilidad y que cumplan sus especificaciones en cuanto a rendimiento por lo que respecta al alcance y la detección de objetos de baja reflectividad. Aunque todos los ingenieros tienen opiniones diversas, es probable que a estas empresas les sea indiferente la implementación de la tecnología si el suministrador puede cumplir los requisitos de rendimiento y fiabilidad con el coste adecuado. Lo cual nos lleva al debate fundamental que este artículo intenta resolver: ¿Qué longitud de onda se impondrá en las aplicaciones de LiDAR para automoción?
Introducción al LiDAR
Para abordar esta cuestión es necesario conocer en primer lugar la anatomía de un sistema LiDAR, del cual existen diferentes arquitecturas. El LiDAR coherente, y entre ellos un tipo denominado FMCW (frequency-modulated continuous wave), mezcla una señal láser transmitida con la luz reflejada para calcular la distancia y la velocidad de los objetos. FMCW ofrece algunas ventajas pero sigue siendo relativamente poco común si se compara con la técnica más empleada para LiDAR: el LiDAR por tiempo de vuelo directo (direct time-of-flight, dToF). Esta modalidad mide la distancia hasta un objeto a partir del tiempo que tarda un pulso muy corto de luz enviado desde una fuente de iluminación hasta que es reflejada por un objeto y devuelto para ser detectado por el sensor. Usa la velocidad de la luz para calcular directamente la distancia hasta el objeto mediante la sencilla fórmula matemática que relaciona tiempo, velocidad y distancia. Un típico sistema LiDAR dToF tiene seis funciones principales de hardware, si bien la elección de la longitud de onda afecta sobre todo a las funciones de transmisión y recepción.
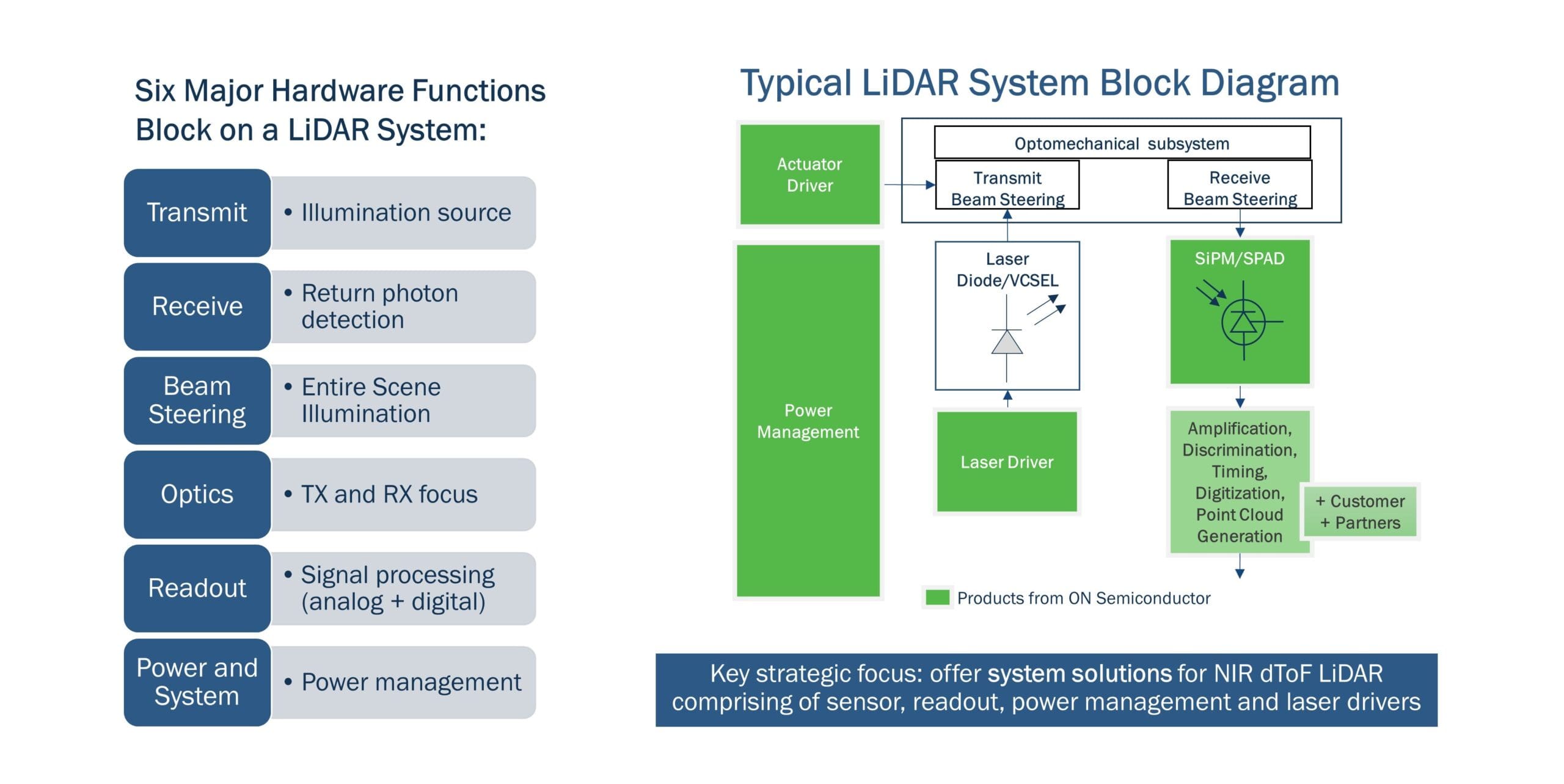
Figura 2: Diagrama de bloques de un típico sistema dToF donde el color verde representa algunas áreas que cuentan con la presencia de productos de onsemi.
La Tabla 1 muestra una lista de varios fabricantes de LiDAR, desde proveedores conocidos de Nivel 1 hasta empresas de nueva creación de todo el mundo. Según los informes del mercado y la información pública, los sistemas LiDAR de la inmensa mayoría de estas empresas funcionan con longitudes de onda del infrarrojo cercano (near infrared, NIR), a diferencia del infrarrojo de onda corta (short wave infrared, SWIR). Además, mientras que los suministradores especializados en SWIR y que utilizan FMCW se limitan a esas longitudes de onda, la mayoría de quienes recurren al tiempo de vuelo directo tienen previsto desarrollar un sistema con longitudes de onda NIR cuando puedan aprovechar una gran parte de sus conocimientos existentes acerca de funciones como el direccionamiento de haz y el procesamiento de señal.
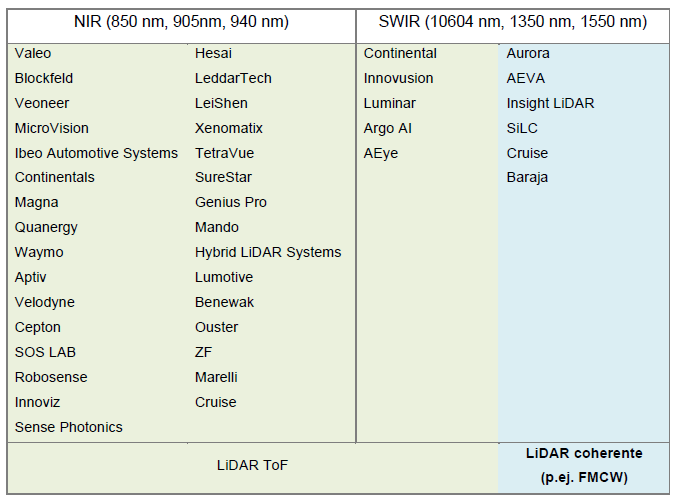
*Esta lista no es exhaustiva y se ha obtenido a partir de información de Yole, IHS Markit y de disponibilidad pública.
Tabla 1. Lista de fabricantes de LiDAR que utilizan longitudes de onda NIR y SWIR.
Dado que la mayoría de estos fabricantes, pero no todos, han escogido longitudes de onda NIR, se debería tener cuenta cómo han llegado a esta decisión y qué implicaciones tiene. El análisis se centra sobre todo en la física relacionada con las propiedades de la luz y los materiales semiconductores que constituyen los componentes utilizados en los LiDAR.
Los fotones emitidos por el láser en un sistema LiDAR (con la intención de que reboten en los objetos y sean recibidos por el detector) han de competir con los fotones del entorno procedentes del sol. Si tenemos en cuenta el espectro de la radiación solar y la absorción atmosférica, hay “caídas” de la irradiación en ciertas longitudes de onda que reducirían la cantidad de fotones existentes como ruido para el sistema. A 905nm hay aproximadamente el triple de irradiancia solar que a 1550nm, lo cual significa que un sistema NIR ha de afrontar más ruido que puede interferir con el sensor. Pero este es solo uno de los factores a tener en cuenta cuando se escoge la longitud de onda para un sistema LiDAR.
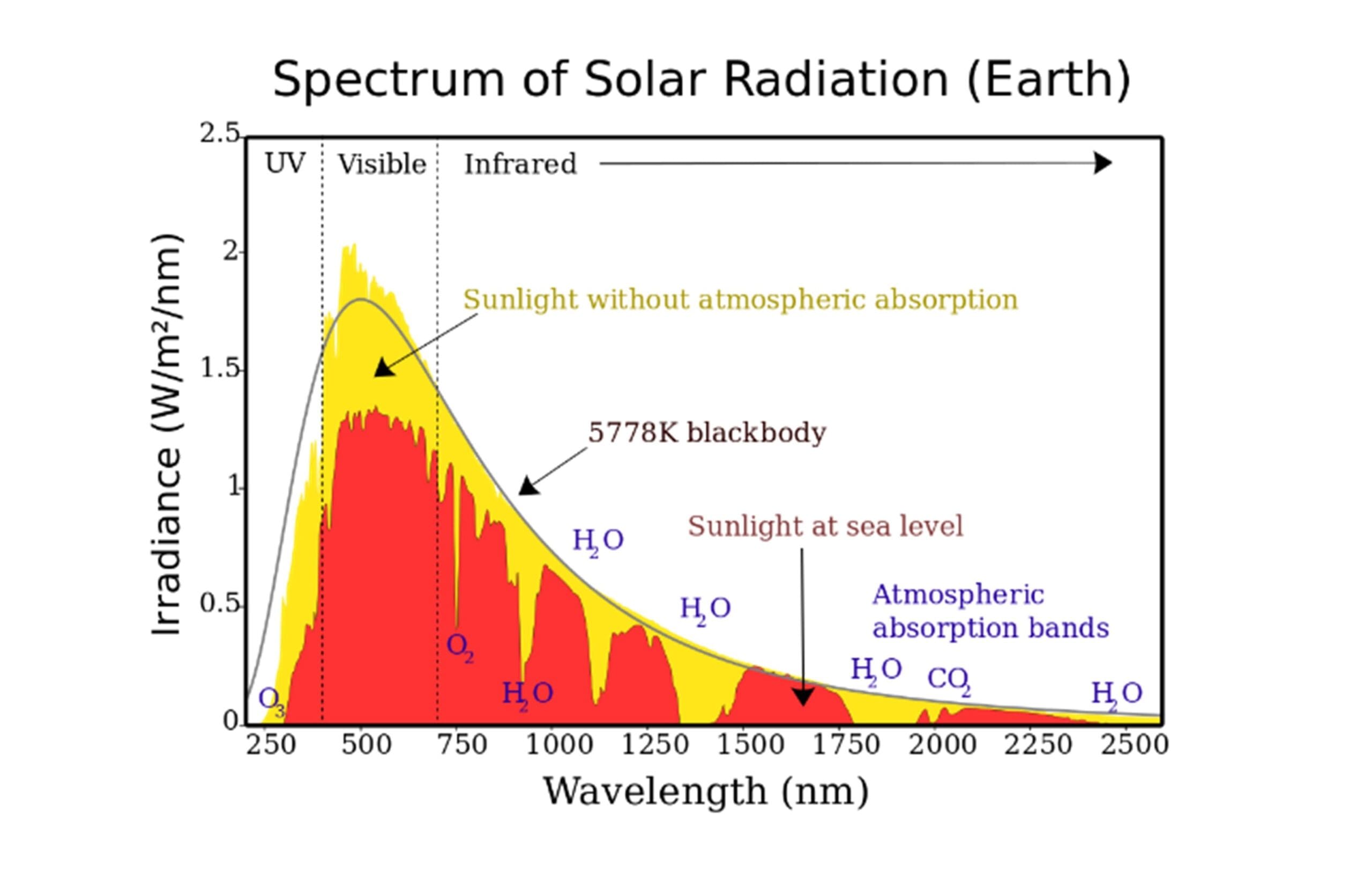
Figura 3: La absorción atmosférica de la luz se produce en unos picos claros.
Sensores
Los componentes responsables de detectar los fotones en el sistema LiDAR son diferentes tipos de fotodetectores, por lo que es importante explicar por qué pueden estar constituidos por diferentes materiales semiconductores dependiendo de la longitud de onda a detectar. En un semiconductor, una banda prohibida separa las bandas de valencia y de conducción, y los fotones suministran la energía necesaria para ayudar a los electrones a superar esa banda prohibida y lograr que el semiconductor conduzca, creando así una corriente fotoeléctrica. La energía de un fotón depende de su longitud de onda y la banda prohibida de un semiconductor depende de su sensibilidad; por eso se necesitan diferentes materiales semiconductores en función de la longitud de onda de la luz que se va a detectar. El silicio, que es el semiconductor más común y cuya fabricación es más barata, es válido para longitudes de onda visibles y NIR hasta unos 1000nm. Para detectar longitudes de onda más altas en el rango de SWIR se puede recurrir a combinaciones de semiconductores de los grupos III/V para obtener materiales como el InGaAs, capaces de detectar longitudes de onda de la luz entre 1000nm y 2500nm.
Los primeros sistemas LiDAR utilizaban fotodiodos PIN como sensores. Los fotodiodos PIN no tienen ganancia inherente y, como resultado de ello, no pueden detectar señales débiles con facilidad. Los fotodiodos de avalancha (avalanche photodiodes, APD) son los tipos de sensores más destacados entre los que se utilizan actualmente en los LiDAR y proporcionan una ganancia moderada. No obstante, los APD también deben funcionar en modo lineal como los fotodiodos PIN para integrar la señal procedente de los fotones entrantes y también sufren las consecuencias de una deficiente uniformidad entre diferentes dispositivos, además de requerir unas tensiones de polarización muy elevadas. Los tipos de sensores más recientes que se están usando cada vez más en los LiDAR se basan en diodos de avalancha de fotón único (single photon avalanche diodes, SPAD), cuya ganancia es muy grande y son capaces de generar una corriente medible a partir de cada fotón detectado. Los fotomultiplicadores de silicio (silicon photomultipliers, SiPM) son matrices de SPAD de silicio cuya ventaja añadida es que pueden distinguir los fotones observando la amplitud de la señal generada.

Figura 4: Diferentes tipos de fotodetectores utilizados para detectar señales en un LiDAR.
Volviendo a la importancia de las longitudes de onda, todos estos tipos de fotodetectores se pueden construir sobre silicio (para detección de NIR) o sobre semiconductores III/V (para detección de SWIR). Por otro lado, la “fabricabilidad” y el coste son fundamentales para la viabilidad de la tecnología, y las plantas de producción de silicio CMOS permiten fabricar estos sensores en grandes cantidades y a bajo coste. Esta es una razón primordial que explica la creciente adopción de SiPM para LiDAR además de permitir un rendimiento más elevado. Si bien hay APD y SPAD para SWIR, resulta difícil integrarlos con la lógica de lectura ya que los procesos no se basan en silicio. Por último, aún no se han comercializado matrices de SPAD y fotomultiplicadores (de forma análoga a los SiPM) que se basan en III/V, por lo que la disponibilidad en el ecosistema favorece las longitudes de onda de NIR.
Láseres
La generación de fotones es un proceso completamente distinto. Para obtener un láser se puede usar una unión de semiconductor P-N como medio de ganancia; esto se lleva a cabo bombeando una corriente a través de la unión que provoca la emisión resonante de fotones mientras los átomos se dirigen a bandas de menos energía, obteniendo como resultado un haz láser coherente. Los láseres de semiconductores se basan en materiales de banda prohibida directa como GaAs e InP, que son eficientes para la generación de fotones que se produce cuando los átomos se dirigen a bandas de menos energía, a diferencia de materiales de banda prohibida indirecta como el silicio.
En los sistemas LiDAR se usan dos tipos de láseres principalmente: EEL (edge-emitting laser) y VCSEL (vertical cavity surface emitting laser). Los EEL se utilizan más en la actualidad debido a su menor coste y su mayor eficiencia de salida respecto a los VCSEL. Son más difíciles de encapsular y de construir en matrices, y también sufren una variación de la longitud de onda con la temperatura, debido a la cual los detectores han de buscar una banda más amplia de longitudes de onda de fotones que también permiten detectar más fotones del entorno como ruido. Pese a su mayor coste y su menor eficiencia energética, la tecnología más reciente de los VCSEL ofrece la ventaja de su encapsulado sencillo y eficiente ya que el haz se genera desde arriba. La adopción de VCSEL en el mercado está aumentando ya que sus costes seguirán disminuyendo significativamente y su eficiencia energética mejorará. Hay EEL y VCSEL para la generación con longitudes de onda NIR y SWIR, con una diferencia clave: las longitudes de onda de NIR se pueden generar con GaAs, mientras que las longitudes de onda de SWIR exigen usar InGaAsP. Los láseres de GaAs admiten obleas más grandes, lo cual reduce su coste y de nuevo supone una ventaja para el ecosistema formado por los fabricantes de LiDAR para NIR desde el punto de vista del coste y de la seguridad de la cadena de suministro.
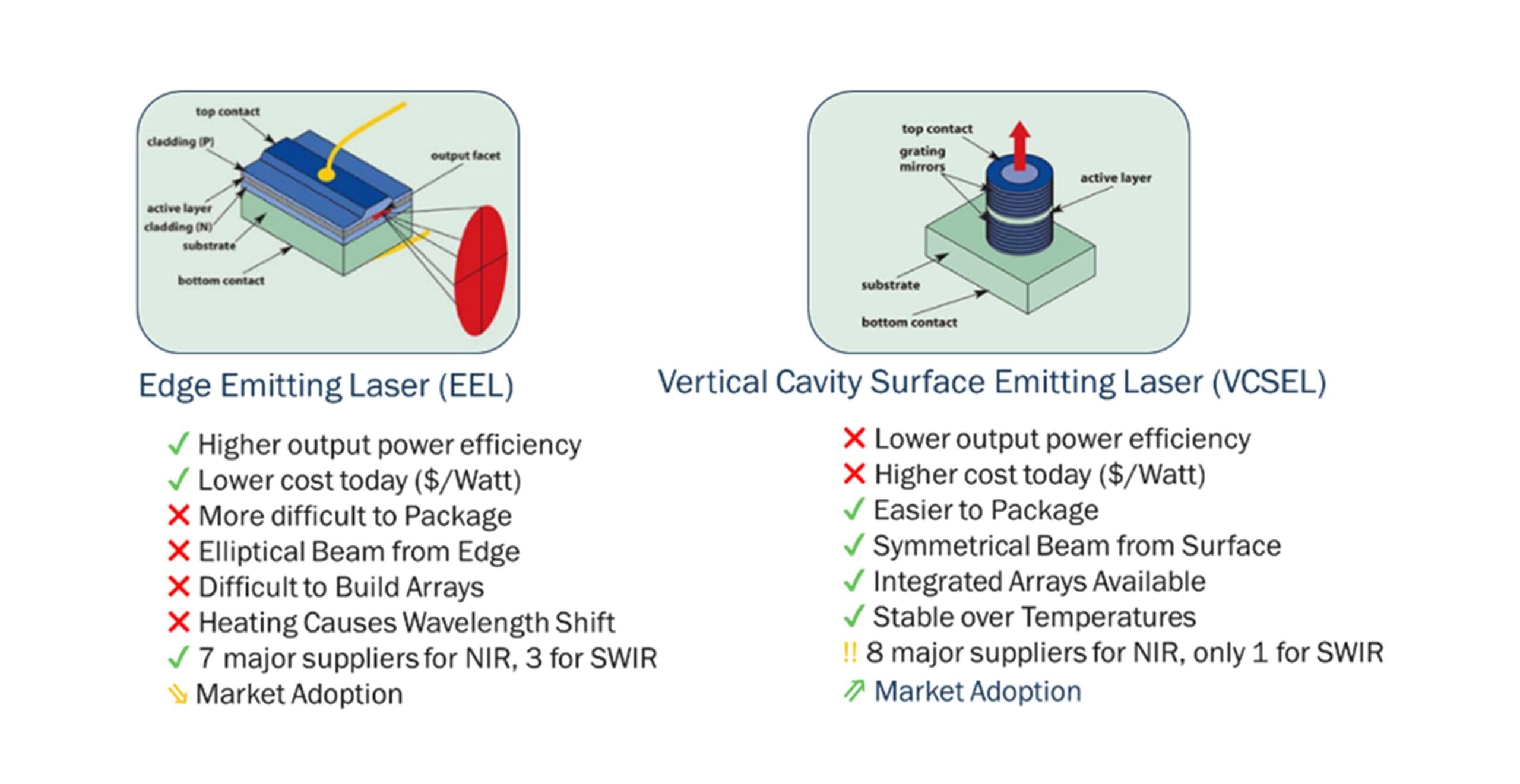
Figura 5: Diferentes tipos de láseres usados en un LiDAR.
Potencia del láser y protección de los ojos
Al hablar sobre la longitud de onda es imprescindible pensar en los efectos de un sistema LiDAR sobre la protección de los ojos. El concepto de LiDAR dToF consiste en usar pulsos láser cortos con altos picos de potencia en un cierto ángulo de visión que se emiten hacia el entorno. Se debe garantizar a un peatón que se encuentre de pie en la trayectoria de emisión de un LiDAR que sus ojos no sufrirán daños por un láser disparado en su dirección, e IEC-60825 es una norma que establece la máxima exposición admisible para diferentes longitudes de onda. Si bien la luz NIR, que es similar a la luz visible, puede atravesar la córnea y llegar hasta la retina del ojo humano, la luz SWIR es absorbida en su mayor parte en la córnea y, como resultado de ello, se puede exponer a unos niveles más elevados.
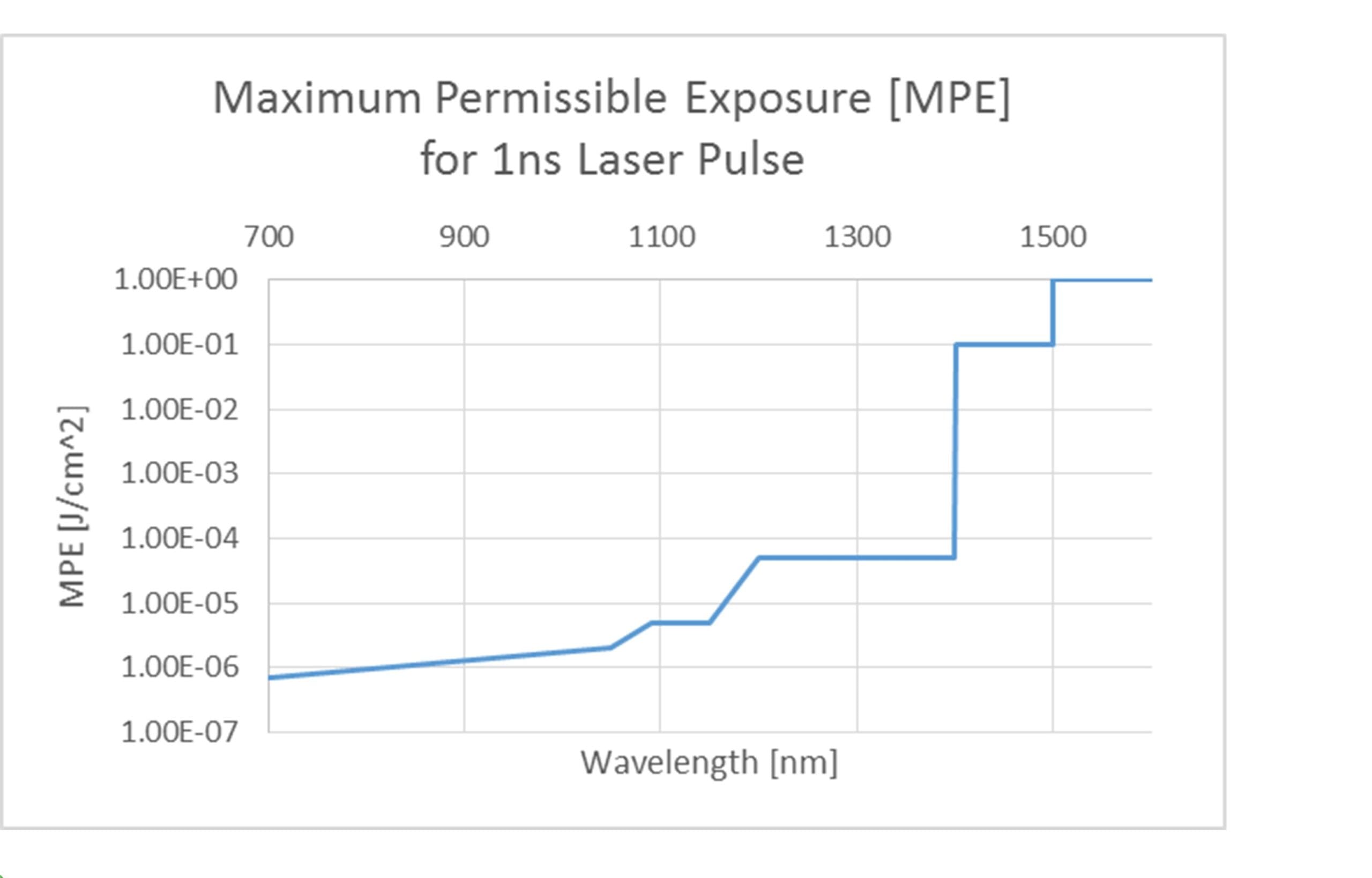
Figura 6: Especificación IEC-60825 para exposición al láser de un ojo humano.
La posibilidad de generar un láser con una potencia más alta en varios órdenes de magnitud supone una ventaja para un sistema de 1550nm en cuanto a rendimiento ya que permite enviar más fotones y por tanto que vuelvan para ser detectados. No obstante, esta mayor potencia también presenta inconvenientes desde un punto de vista térmico. Es preciso recalcar que se ha de realizar un diseño adecuado que proteja el ojo con independencia de la longitud de onda, teniendo en cuenta la energía por pulso y el tamaño de la apertura del láser. En un LiDAR de 905nm, la potencia máxima se puede incrementar por alguno de estos factores, como indica la Figura 8.
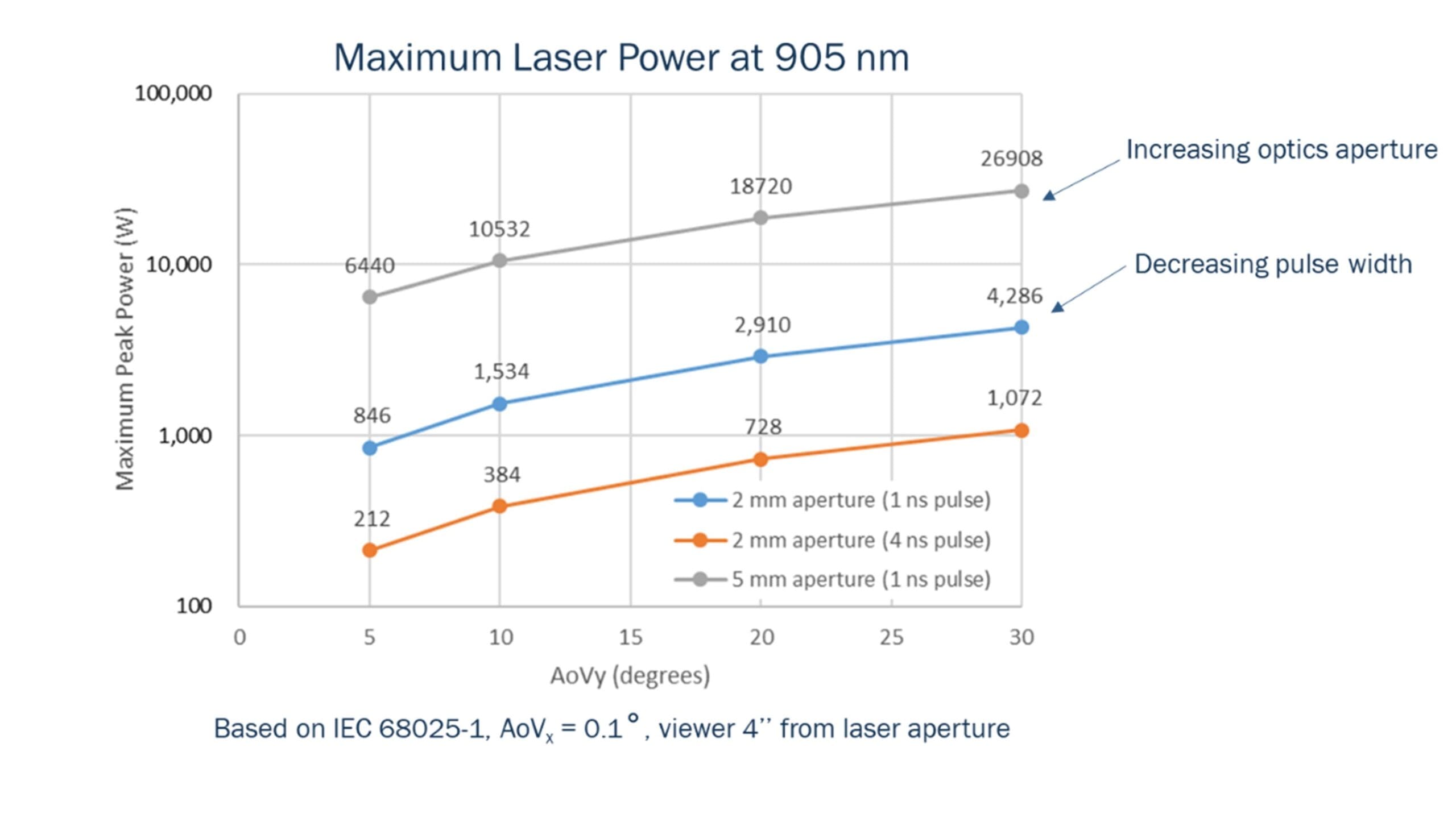
Figura 7: Diseño de un láser que proteja los ojos para un LiDAR NIR con diferentes parámetros ópticos y del láser.
Comparación entre sistemas LiDAR NIR y SWIR
La cuestión de la cantidad de potencia del láser nos devuelve otra vez a los sensores utilizados. Un sensor de mayor rendimiento que sea capaz de detectar señales más débiles se verá claramente beneficiado por el sistema de varias maneras: podrá alcanzar una mayor distancia o podrá usar menos potencia del láser para llegar a la misma distancia. onsemi ha desarrollado su serie RDM de SiPM para LiDAR NIR, que aumenta hasta un 18%, la más alta del mercado, la eficiencia de detección de fotones (photon detection efficiency, PDE), un parámetro clave que indica la sensibilidad.
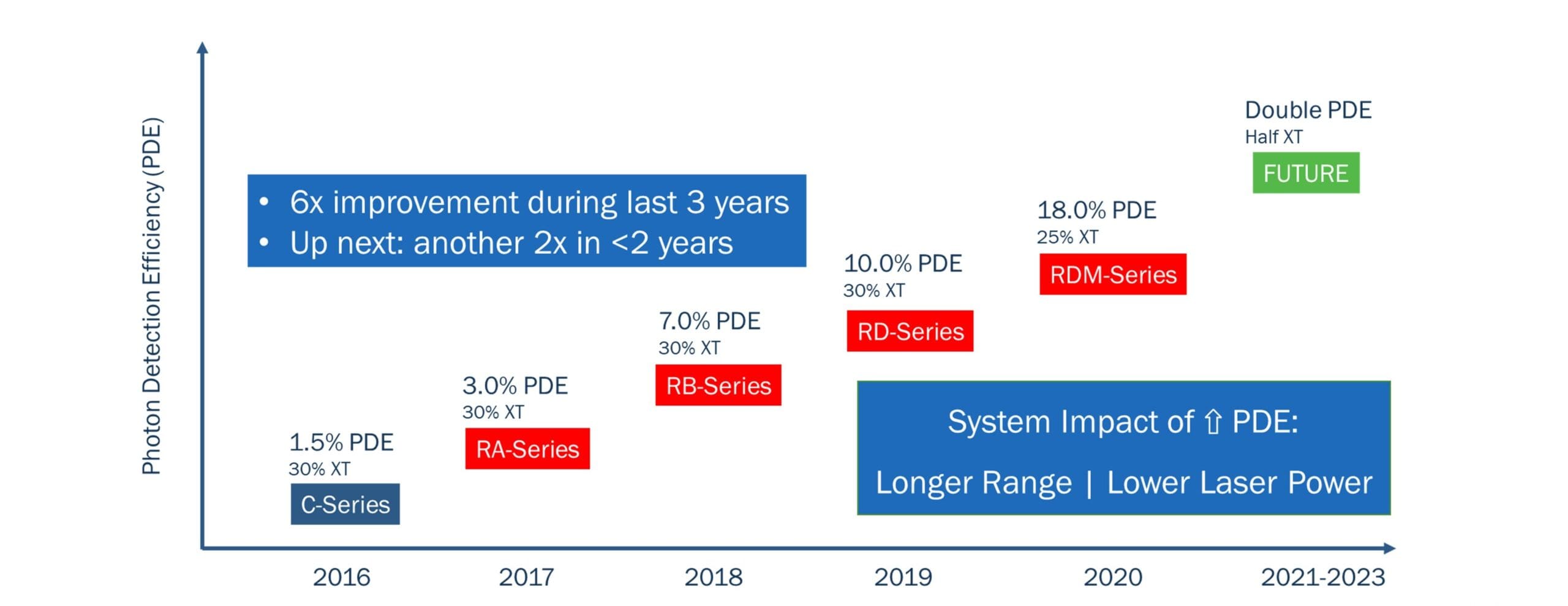
Figura 8: Evolución de los SiPM de onsemi.
Para comparar el rendimiento de un LiDAR NIR dToF con un LiDAR SWIR dToF hemos ideado un modelo del sistema para arquitecturas de LiDAR idénticas y bajo las mismas condiciones ambientales con diferentes parámetros para los láseres y los sensores. La arquitectura del LiDAR es un sistema coaxial con una matriz de detectores de 16 canales y un mecanismo de barrido por todo el campo de visión, tal como muestra la Figura 10. Este modelo del sistema se ha validado con hardware y permite estimar con exactitud el rendimiento de sistemas LiDAR.

Figura 9: Modelo del sistema para un sensor de LiDAR dToF.
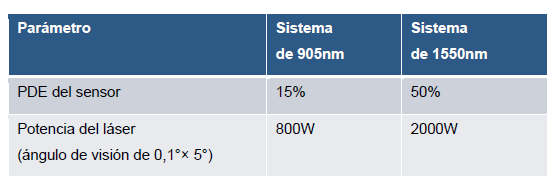
Tabla 2: Parámetros de sensor y láser LiDAR para simular el modelo del sistema NIR y SWIR.
El sistema de 1550nm utiliza una mayor cantidad de potencia del láser así como un sensor con una PDE más alta ya que recurre a aleaciones de InGaAs de PDE elevada que deberían ofrecer un mejor rendimiento en nuestra simulación del sistema. A continuación se indican los resultados obtenidos con unos parámetros del sistema de 100klux de luz iluminación ambiental con un filtro de paso de banda de 50nm en la lente del sensor (centradas en unos 905nm y 1550nm, respectivamente), un ángulo de visión de 0,1° x 5° con un barrido de 80° horizontal a 30fps, una velocidad de repetición del láser de 500kHz con una anchura del pulso de 1ns y un diámetro de la lente de 22mm.
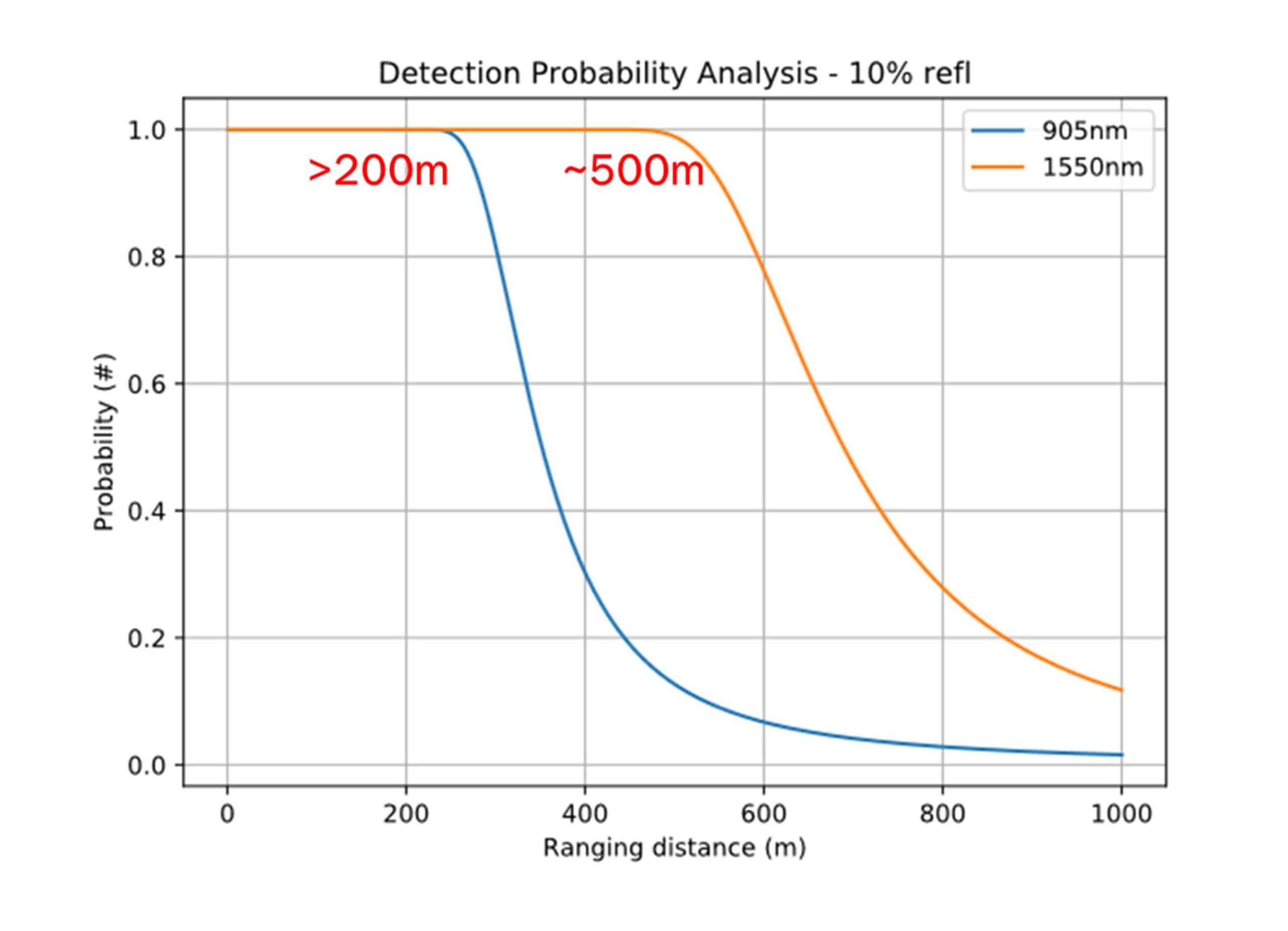
Figura 10: Resultados de la simulación para sistemas LiDAR similares de 905nm y 1550nm.
Como era de prever, el sistema de 1550nm es capaz de llegar más lejos cuando el objeto es de baja reflectividad, hasta 500m con una probabilidad de alcance del 99%. Sin embargo, el sistema de 905nm aún supera los 200m, demostrando así que ambos tipos de sistemas pueden cumplir los requisitos de LiDAR a larga distancia en aplicaciones de automoción bajo unas condiciones ambientales normales. Cuando las condiciones ambientales son adversas, como la lluvia o la niebla, las propiedades de absorción de agua de la luz SWIR hacen que su rendimiento se degrade con más rapidez que un sistema basado en NIR, lo cual es otro factor a tener cuenta.
Evaluación del coste
Tras haber estudiado extensamente la tecnología de los sistemas LiDAR y las implicaciones que conlleva el uso de diferentes longitudes de onda, pasemos de nuevo al factor coste. Hemos explicado antes que los sensores utilizados en los LiDAR basados en NIR se obtienen mediante procesos de silicio CMOS que minimizan el coste de los semiconductores. También permiten integrar la lógica de lectura CMOS con el sensor en un solo chip gracias al uso de una tecnología de integración apilada que ya está disponible en las actuales plantas de fabricación de semiconductores, de modo que acortan la cadena de señal y reducen el coste. En cambio, los sensores SWIR usan semiconductores III/V como InGaAs cuyo coste es más elevado, mientras que la nueva tecnología híbrida de Ge-Si podría disminuir el coste de los sensores SWIR y facilitar la integración con la lógica de salida, pese a lo cual se estima que serán unas 5 veces más caros que el silicio CMOS tradicional, incluso en su fase de madurez. Por lo que se refiere al láser, la diferencia entre el tamaño de la oblea entre las obleas de GaAs utilizadas para fabricar los chips láser en los sistemas NIR y las obleas de InGaAs utilizadas para fabricar los chips láser en los sistemas SWIR indica de nuevo una disparidad de coste y el hecho de que los sistemas NIR recurran a VCSEL con un número mucho mayor de suministradores disponibles, algo que también permite disminuir el coste de integración.
La suma total de los factores citados centró un análisis realizado por IHS Markit (Amsrud, 2019), el cual demostró que para el mismo tipo de componente (sensor o láser), el coste para un sistema SWIR sería entre 10 y 100 veces mayor que para un sistema NIR. El coste medio de los componentes para el sensor y el láser en un sistema NIR se estimó entre 4 y 20 dólares por canal en 2019 y se espera que decrezca hasta 2 a 10 dólares en 2025. En cambio, el coste medio de los componentes equivalentes para un sistema SWIR se estimó en 275 dólares por canal en 2019 y se espera que decrezca hasta 155 por canal en 2025. Se trata de una enorme diferencia de coste si se tiene en cuenta que los sistemas LiDAR contienen numerosos canales, incluso si usan un barrido 1D, ya que siguen necesitando una matriz vertical de canales de un solo punto.
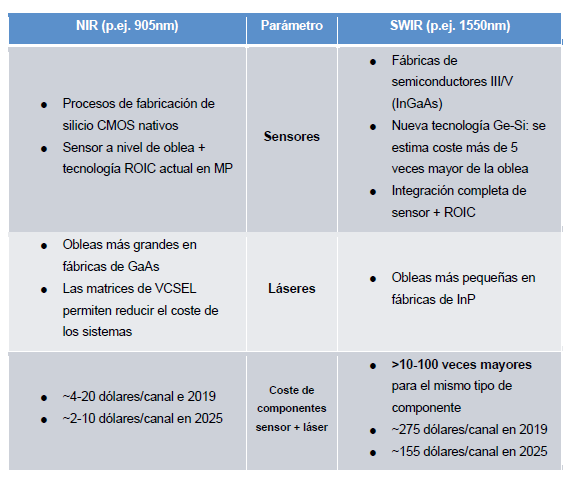
Tabla 3: Resumen de la evaluación de costes (fuente: IHS Markit).
La dinámica del mercado LiDAR tampoco favorece al SWIR. El mercado de la conducción autónoma no ha evolucionado con la rapidez esperada hace cinco años. Así, los sistemas con autonomía de Nivel 4 y Nivel 5, en los cuales es imprescindible el LiDAR, están a años de su despliegue generalizado. Mientras tanto, los mercados de la industria y la robótica que usan LiDAR son aún más sensibles al coste y no necesitan las ventajas del rendimiento extremadamente alto de un sistema SWIR, por lo que estos fabricantes no tienen la posibilidad de reducir los costes de los componentes debido al aumento de la demanda, como a menudo se señalaba. Es un problema como el del “huevo y la gallina”: lograr un menor coste aumentando la demanda pero la mayor demanda exige reducir el coste.
Resumen
Tras estudiar con detalle la tecnología y las diferencias entre los sistemas NIR y SWIR, está claro que la inmensa mayoría de los sistemas LiDAR existentes en la actualidad están utilizando longitudes de onda NIR. Si bien las previsiones nunca son totalmente seguras, parece que el coste y la disponibilidad de suministradores son factores clave, y los sistemas basados en NIR desde luego siempre serán más económicos gracias a su ventaja tecnológica y a las economías de escala del silicio CMOS. Si bien SWIR no permite disponer de un sistema LiDAR con un mayor alcance, los LiDAR basados en NIR también pueden cumplir los requisitos de larga distancia en el ámbito de la automoción, además de ofrecer un excelente rendimiento en las configuraciones de corto a largo alcance que también necesitan los sistemas avanzados de asistencia a la conducción y de conducción autónoma. La existencia de LiDAR basados en NIR en fase de producción masiva para el mercado de automoción indica hoy que la tecnología se ha comercializado y probado, pero hace falta que transcurra un cierto plazo de consolidación durante el cual habrá ganadores y perdedores. Después de todo, a principios del siglo XX había 30 fabricantes de automóviles y esta cifra aumentó hasta unos 500 a lo largo de los diez años siguientes, pero solo pasaron unos pocos años para que la gran mayoría desapareciera. Se espera que la dinámica sea parecida con los fabricantes de LiDAR hasta finales de esta década.





