
Abe Ibraheim, Central Applications Intern, Kenneth Armijo, Central Applications Engineer, y Piyu Dhaker, Staff Engineer
¿Por qué mi bobina está emitiendo sonido o se sobrecalienta?
Posiblemente sea un mal dimensionamiento de la bobina o un incumplimiento en la corriente mínima de saturación soportada, los cuales pueden provocar diferentes problemas en los convertidores DCDC, como el ringing sonoro o el sobrecalentamiento.
Este artículo es el primero de una serie en la que se analizarán los errores comunes de diseño de las fuentes de alimentación conmutadas (SMPS), así como su rectificación. El objetivo es abordar las complicaciones que surgen con el diseño de la etapa de potencia de los reguladores de conmutación DC-DC, centrándose en la bobina. Los diseñadores optan por valores de bobina fuera del rango recomendado para obtener alguna de las siguientes ventajas: ondulaciones de salida más pequeñas o minimizar la huella de la solución. Sin embargo, la selección de componentes con valores demasiado grandes o demasiado pequeños tiene consecuencias no deseadas que pueden provocar daños graves en el chip, así como una disminución de la eficiencia. Este artículo también examina lo que sucede cuando no se tiene el cuidado adecuado para garantizar que la corriente de carga no exceda la saturación máxima de la bobina.
¿Qué es una fuente de alimentación conmutada?
Una fuente conmutada (Switch Mode Power Supply o SMPS, en inglés) es un tipo de regulador de alta eficiencia que bien reduce una tensión de entrada (convertidor buck), aumenta la tensión de entrada (convertidor boost) o ambas (buck-boost). En la Figura 1 se pueden observar las topologías básicas de este tipo de reguladores.

Figura 1. Topologías comunes de reguladores conmutados y su fórmula de salida.
Todas las fuentes conmutadas SMPS funcionan almacenando energía en la bobina y utilizan técnicas de PWM (Pulse Width Modulation) para obtener la salida deseada. El principio que regula estos convertidores viene dado por lo que se conoce en inglés como Volt second Balance Law que dicta que el promedio de la corriente de una bobina durante un periodo, cuando se opera en un estado estacionario, debe ser cero. Esto significa que la bobina debe descargar toda la energía almacenada durante la etapa de carga, antes de comenzar un nuevo periodo.
Funcionamiento del convertidor buck
En este artículo solo se utilizan convertidores buck (reductores) para demostrar errores de diseño comunes. Cuatro componentes componen la etapa de potencia de un convertidor reductor: la bobina, el condensador de salida, el FET superior representado por un interruptor y el FET inferior, que está representado por un diodo (ver Figura 2).
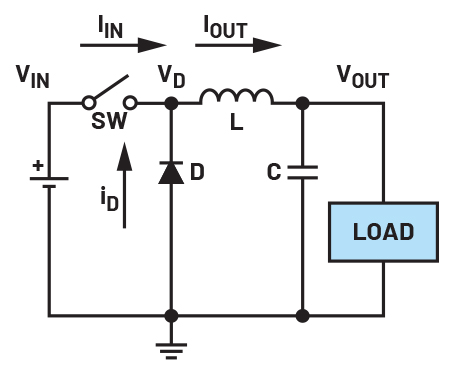
Figura 2. Etapa de potencia simplificada del convertidor buck
La tensión a través de la bobina es VL = L diL/dt. Esta tensión es la diferencia entre la tensión de la salida y la tensión en el nodo de conmutación. Cuando el FET superior está activado (estado ON), VL es la diferencia entre la entrada y la salida. Sin embargo, cuando el FET superior está desactivado (estado OFF), la diferencia es 0V menos la salida, puesto que el nodo de conmutación está a tierra.
diL/dt (∆iL) es el cambio de corriente de la bobina por unidad de tiempo, conocido habitualmente como la corriente de ripple de la bobina. Cuando el FET superior está cerrado (y el inferior abierto), la bobina almacena la energía en forma de flujo magnético cuando la corriente que pasa por la bobina va incrementando. Cuando el FET superior está abierto y el campo magnético se colapsa, el FET inferior crea un paso hacia GND permitiendo el flujo de corriente hacia la salida mientras disminuye. Esto se puede observar en la forma de onda de la corriente de la bobina mostrada en la Figura 3. El condensador de la salida se utiliza para suavizar el rizado de salida y para ayudar a mantener la tensión de salida. La tensión de salida de un convertidor de tipo Buck se obtiene como VOUT = DVIN, donde D es el ciclo de trabajo (duty cycle) y se define como el porcentaje del tiempo en el cual el FET superior permanece activo y está cargando la bobina.

Figura 3. Forma de onda de la corriente en la bobina. La corriente a través de la bobina se carga cuando el FET superior está activo y se descarga cuando no lo está.
Dimensionamiento de bobina recomendado
Cuando se diseña una fuente SMPS, se debe seleccionar el valor correcto de inductancia para asegurar una corriente de rizado aceptable (∆iL). Para convertidores de tipo buck se recomienda que la corriente de rizado sea entre un 30% y un 40% de la corriente de carga. Este rango está considerado como el óptimo puesto que es lo suficientemente grande para proporcionar una señal suficiente para el sistema de retroalimentación (feedback) del control de corriente, pero no demasiado grande para evitar que el convertidor funcione en el modo de conducción discontinua (DCM, por sus siglas en inglés de discontinuos conduction mode). Este modo es un estado en el que la corriente de rizado es muy grande y necesita cruzar la línea de 0A para mantener la corriente de carga al valor deseado. Sin embargo, cuando la corriente llega a 0A, los diodos internos de los FETs ya no conducen, evitando que la corriente disminuya por debajo de 0A.
Una forma general de seleccionar la bobina correcta se puede obtener mediante la fórmula:

Esta fórmula muestra que la frecuencia de conmutación y la inductancia son inversamente proporcionales, lo que significa que, con frecuencias más altas, el tiempo de carga se reduce, lo que permite un funcionamiento adecuado con una bobina más pequeña (ahorrando tamaño de huella y coste).
Saturando la bobina
Uno de los errores más comunes y catastróficos en el diseño de SMPS es descuidar el límite de corriente de saturación al seleccionar la bobina. Cuando la corriente a través de la bobina excede la corriente nominal de saturación, el núcleo del inductor se satura, lo que significa que el campo magnético generado ya no aumentará proporcionalmente a la corriente consumida. Esto interrumpe la ley de equilibrio, lo que lleva a una pérdida de características lineales tanto en la corriente de rizado como en el rizado de la tensión de salida. Cuando el núcleo de hierro se satura, pierde inductancia rápidamente, comportándose más como una resistencia que como una inductancia. Dado que la resistencia serie (ESR) de la bobina aumenta y la inductancia disminuye, el cambio en la corriente se ve obligado a aumentar para satisfacer el equilibrio. El pico observado en la forma de onda de la corriente saturada se debe al aumento exponencial de la pendiente de la corriente y se puede ver en la Figura 4. Este pico de corriente se traslada a la tensión de salida, lo que genera más ruido y picos de tensión, como se ve en la Figura 5. El ruido y los picos de tensión pueden dañar potencialmente los componentes aguas abajo si el voltaje aumenta demasiado y excede la clasificación de voltaje máximo de un componente aguas abajo, así como degradar el rendimiento de EMI.
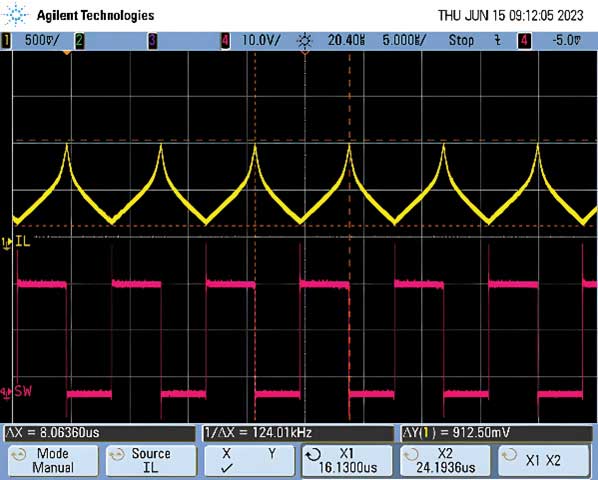
Figura 4. Forma de onda de la corriente de una bobina saturada. La forma de onda se comporta normalmente hasta que la corriente supera la corriente nominal de saturación.

Figura 5. Rizado de la tensión de salida con una bobina saturada. Los picos se trasladan a la salida en forma de picos de tensión y ruido.
Además, con altas fluctuaciones de corriente, la bobina experimenta una rápida pérdida de histéresis que conduce a una disipación de calor excesiva, como se ve en la Figura 6, así como a un ruido audible. Este exceso de calor puede dañar otros componentes cercanos, especialmente el propio regulador.

Figura 6. Disipación de una bobina saturada – 107.78°C (226ºF).
Para evitar este problema, los diseñadores deben elegir bobinas con una corriente nominal de saturación al menos dos veces mayor que la corriente máxima esperada. Al calcular la corriente máxima, es importante tener en cuenta la corriente de rizado, así como la corriente de carga de la salida. Además, los diseñadores pueden consultar la hoja de datos de la bobina seleccionada para averiguar a qué corriente la inductancia cae entre un 10% y un 30% de su valor original, que es donde se define la saturación. La elección de una bobina con la corriente nominal de saturación adecuada dará como resultado el funcionamiento normal del sistema, con una corriente lineal a través de ella como se ve en la Figura 7; y los picos de tensión en la salida desaparecerán, como se ve en la Figura 8. Finalmente, el sistema funcionará a una temperatura mucho más baja, como se ve en la Figura 9, estresando menos el dispositivo y mejorando la vida útil de este.
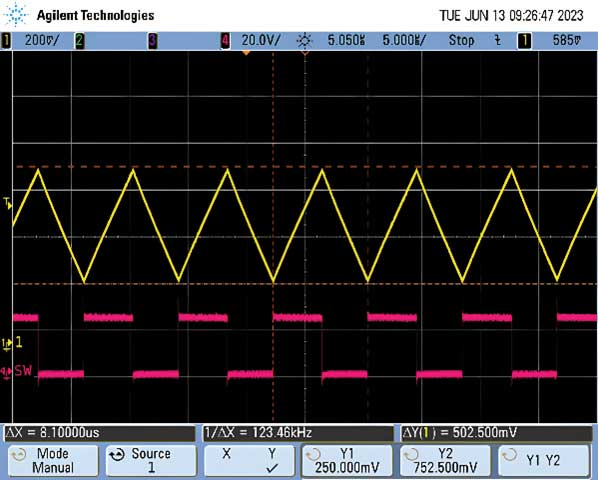
Figura 7. Forma de onda de una bobina dentro del rango de corriente nominal.
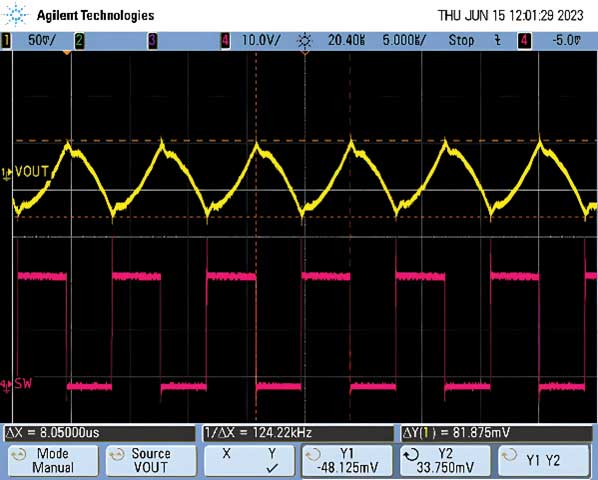
Figura 8. Rizado de la tensión de salida con una bobina dentro de su rango nominal de corriente.
Los diseñadores deben tener cuidado al elegir la bobina para que proporcione una corriente de rizado de aproximadamente 30% a 40%. De esta forma, se reducirá la magnitud de la corriente de rizado y se devolverá el dispositivo a su modo continuo (CCM) desde DCM, como se ve en la Figura 12. Esto también mejorará rizado de la tensión de salida y eliminará los picos de tensión, como se ve en la Figura 8. Si un diseñador tiene problemas para calcular el valor deseado de la bobina y elegir un componente viable, puede usar LTPowerCAD como soporte en su diseño y para seleccionar los componentes de la etapa de potencia.

Figure 9. Disipación de una bobina dentro de su rango nominal de corriente37.61°C (99.7ºF).
Complicaciones con bobinas por debajo de lo recomendado
Los diseñadores a menudo prefieren bobinas más pequeñas para ahorrar espacio, ya que las bobinas de menor valor suelen tener dimensiones físicas más pequeñas debido a un menor número de espiras. Sin embargo, si el inductor es demasiado pequeño, la corriente de rizado será grande y obligará al convertidor a entrar en DCM, lo cual no es deseable para el convertidor SMPS porque el dispositivo será menos eficiente y mostrará un peor rendimiento de interferencia electromagnética (EMI). Este rendimiento degradado de EMI se puede ver en presencia de oscilaciones (ringing) en el nodo de conmutación, causados por parásitos, así como por el circuito LC (creando un circuito resonante), que se puede ver en la Figura 10. Este timbre se trasladará a la tensión de salida, lo que provocará un rizado mayor y más picos de tensión, como se ve en la Figura 11. Además, la fuente de alimentación ya no estaría en modo de conducción continua (CCM) y las fórmulas de salida para un convertidor SMPS ya no aplican.
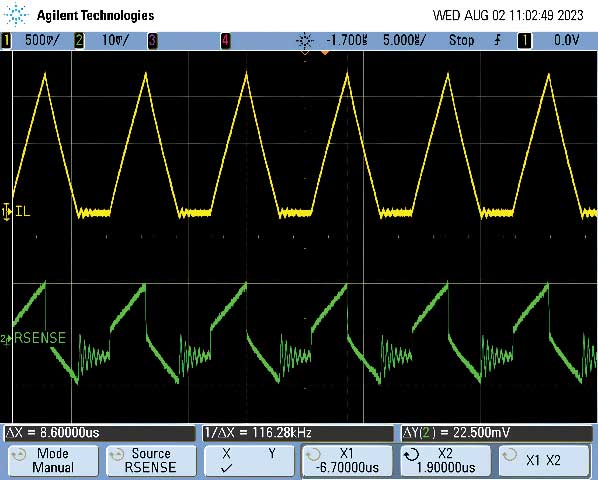
Figura 10. Forma de onda de corriente de una bobina mal dimensionada. El ringing presente en la corriente y en la Resistencia de sensado, indican que el convertidor está en modo DCM.

Figura 11. Forma de onda de la salida con una bobina mal dimensionada. Se pueden observar las oscilaciones en el nodo de conmutación.
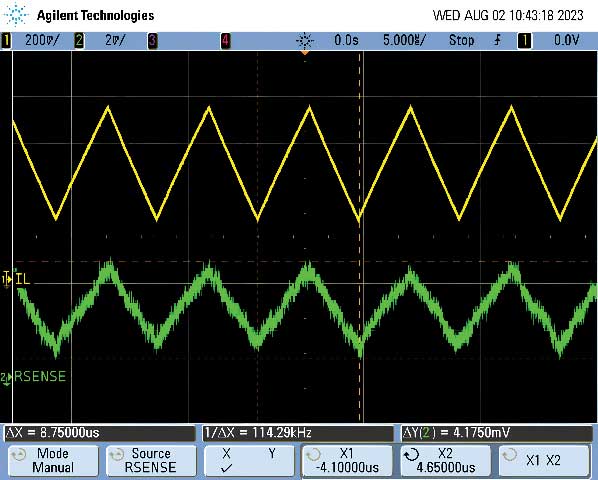
Figura 12. Forma de onda de la corriente de la bobina dentro de su rango nominal.
Complicaciones con bobinas por encima de lo recomendado
Los componentes electrónicos aguas-abajo conectados a un SMPS suelen tener tensiones de alimentación especificados con una tolerancia asociada. Si el rizado en la tensión es demasiado grande, afectará drásticamente al funcionamiento del sistema. Por ejemplo, si un microcontrolador tiene una especificación de alimentación de 3.3 V ±50 mV, tener un rizado superior a ±50 mV puede hacer que el microcontrolador se apague. Una forma en que los diseñadores a menudo intentan mitigar este rizado es aumentando el tamaño de su bobina. Sin embargo, si la bobina tiene un tamaño demasiado grande, tanto la corriente de rizado como el rizado de la tensión de salida disminuyen significativamente. Aunque esto suena deseable, dará lugar a problemas con el sistema de retroalimentación y también puede dar lugar a una respuesta transitoria mucho más lenta. Un pequeño rizado hará que sea extremadamente detectar algún cambio por la resistencia de sensado, distorsionando la forma de onda triangular habitual que se pasa al bucle de retroalimentación. Cuando la corriente de rizado es pequeña, la relación señal-ruido (SNR) se deteriora también provocando que el bucle de retroalimentación registre ruido como la señal de la bobina, lo que resulta en una inestabilidad no deseada en la salida, que se manifiesta como una fluctuación (ver Figura 13).
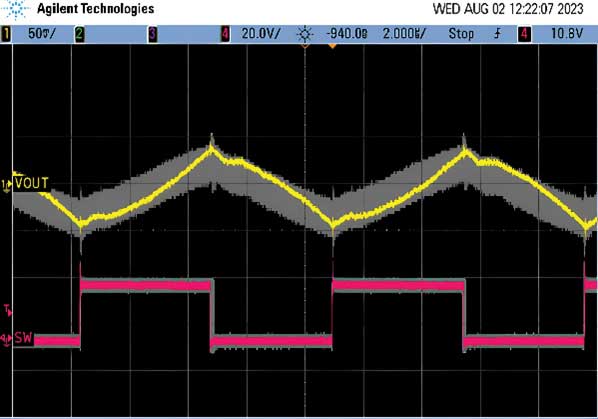
Figura 13. Jitter causado por la inestabilidad de la salida. La forma de onda de una bobina dimensionada por encima de lo necesario se muestra con la función de persistencia para ver la inestabilidad.
Además, con bobinas de mayor valor, la corriente nominal de saturación suele ser menor. Esto puede provocar la saturación de la bobina, lo cual es peligroso para el dispositivo, como se explica en la sección “Saturando la bobina”. El efecto de saturar una bobina extremadamente sobredimensionado se puede ver en la Figura 14.
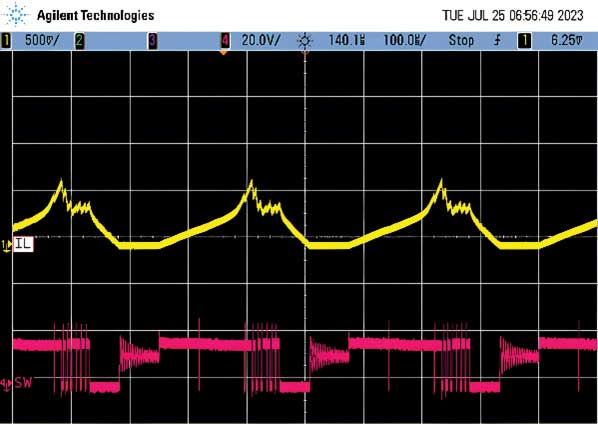
Figura 14. Forma de onda de una bobina saturada con una bobina 22 veces el valor nominal. El rango de corriente no incrementa proporcionalmente con la inductancia.
Para mitigar este problema, los diseñadores deben tener en cuenta que el rizado de salida se puede controlar alterando los condensadores de salida. Al aumentar el valor del condensador de salida o disminuir su ESR, el rizado se puede reducir sin tener que aumentar el valor del inductor. Esto permitirá que la corriente del rizado de la bobina permanezca en un valor entre el 30% y el 40%, permitiendo que la arquitectura de detección adquiera correctamente la señal. Esto se puede ver en la Figura 15.

Figura 15. Forma de onda en la resistencia de sensado con valores nominales.
Conclusión
Este artículo sirve como guía para analizar los problemas de diseño de las bobinas en el caso de los convertidores de tipo buck. Además, tiene como objetivo proporcionar soluciones prácticas en caso de que los diseñadores vean alguno de los rendimientos no deseados que se muestran aquí. Mantener la corriente de rizado en el rango del 30% al 40% de la salida mediante el dimensionamiento adecuado de la bobina es fundamental para garantizar que el dispositivo permanezca en CCM y no cause fluctuaciones o saturación no deseadas, lo que podría ser fatal para la carga o el propio chip del regulador.




