
Avances en la memoria flash que han apoyado a vehículos definidos por software
Si entra en cualquier centro de servicio de vehículos, es probable que vea muchas de las herramientas que siempre ha asociado a la reparación de problemas mecánicos. Sin embargo, es probable que esto cambie considerablemente en los próximos años. Con el aumento del número de vehículos eléctricos (EV), respaldado por los planes gubernamentales para reducir las emisiones de carbono, es probable que los centros de servicio necesiten más la ayuda de un portátil que la de una llave inglesa. Aunque el cambio visible más obvio es la transición de los motores de combustibles fósiles a los eléctricos, o el uso de interiores que se asemejan a un teléfono móvil, uno de los cambios más importantes se está produciendo en los componentes electrónicos ocultos en el vehículo.
A medida que los componentes electrónicos han reemplazado las funciones mecánicas, la solución habitual ha sido desarrollar una centralita electrónica (ECU) dedicada. Con el paso del tiempo, estas se han conectado a la red utilizando tecnologías como CAN, LIN y FlexRay para así optimizar la funcionalidad, facilitar la programación y proporcionar diagnósticos. Sin embargo, esto ha causado un aumento de la complejidad y una falta de flexibilidad en las plataformas de vehículos. Además, al tratarse de una generación que ha crecido con Internet y móviles y que ahora son lo suficientemente mayores para comprar estos vehículos, este enfoque rígido es completamente contrario a lo que están acostumbrados: funcionalidades orientadas a los usuarios.
La industria automotriz está definida por décadas de arquitectura eléctrica y electrónica (E/E), lo que hace que sea difícil pasar a un enfoque más flexible y basado en software. Cada función está meticulosamente definida, construida y aprobada para su uso específico y no se puede reemplazar con una alternativa o actualizar sus características durante su vida útil. Por lo general, las ECU están diseñadas para su uso en un ámbito específico, como la propulsión, el infoentretenimiento, la carrocería y el confort, o los sistemas avanzados de asistencia al conductor (ADAS).
El cambio a arquitecturas de dominio, zonal y central
Está claro que deben realizarse muchos cambios en el software para poder ofrecer nuevas características a los propietarios de vehículos. Esto hace que el diseño automotriz se desplace hacia el de los teléfonos inteligentes, al entregar una gran pieza de hardware que puede recibir actualizaciones de software regulares y nuevas características de software. Sin embargo, existe también un gran desafío para mantener la fiabilidad de este enfoque definido por software de vehículos, especialmente con respecto a la seguridad funcional.
Actualmente, hay tres arquitecturas diferentes en desarrollo. Aquellos que eligen una arquitectura de dominio mantienen juntas las funciones que pertenecen a un dominio específico, como el cuerpo y la comodidad. Múltiples ECU se reducen, en la medida de lo posible, a una única ECU más grande y potente en la que las funciones se implementan en el software. Estas se conectan en red con una ECU de pasarela que proporciona acceso a Internet y permite actualizaciones por vía aérea (OTA) (figura 1).
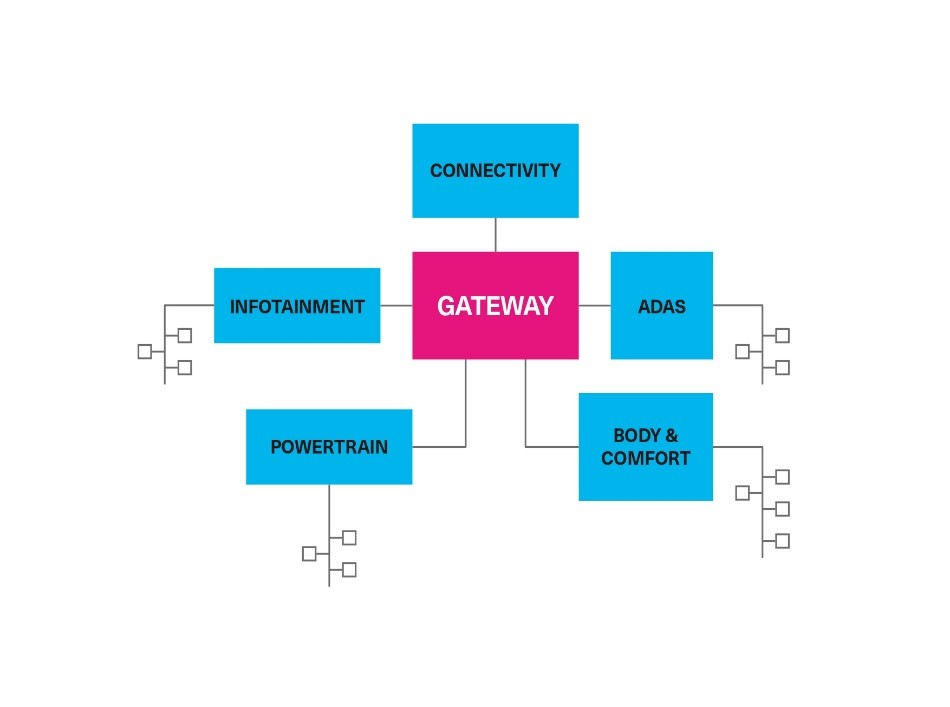
Figura 1: La arquitectura de dominio reúne las funciones de dominio clásicas en potentes centralitas electrónicas.
El segundo enfoque, la arquitectura zonal, es en muchos sentidos más pragmática. Se colocan ECU grandes y potentes en cada esquina del vehículo, cerca de donde se necesitan estas funciones. Por ejemplo, en una de las esquinas traseras, el controlador de dominio podría ser responsable del grupo de luces, cámaras traseras, sensores de estacionamiento y accionamiento eléctrico para la puerta del maletero. Cada controlador cuenta con múltiples funciones (iluminación, abrir puertas) implementadas en software, conectadas mediante la Ethernet automotriz. El control general se proporciona mediante un ordenador central de alto rendimiento (HPC) conectado a una pasarela (figura 2).
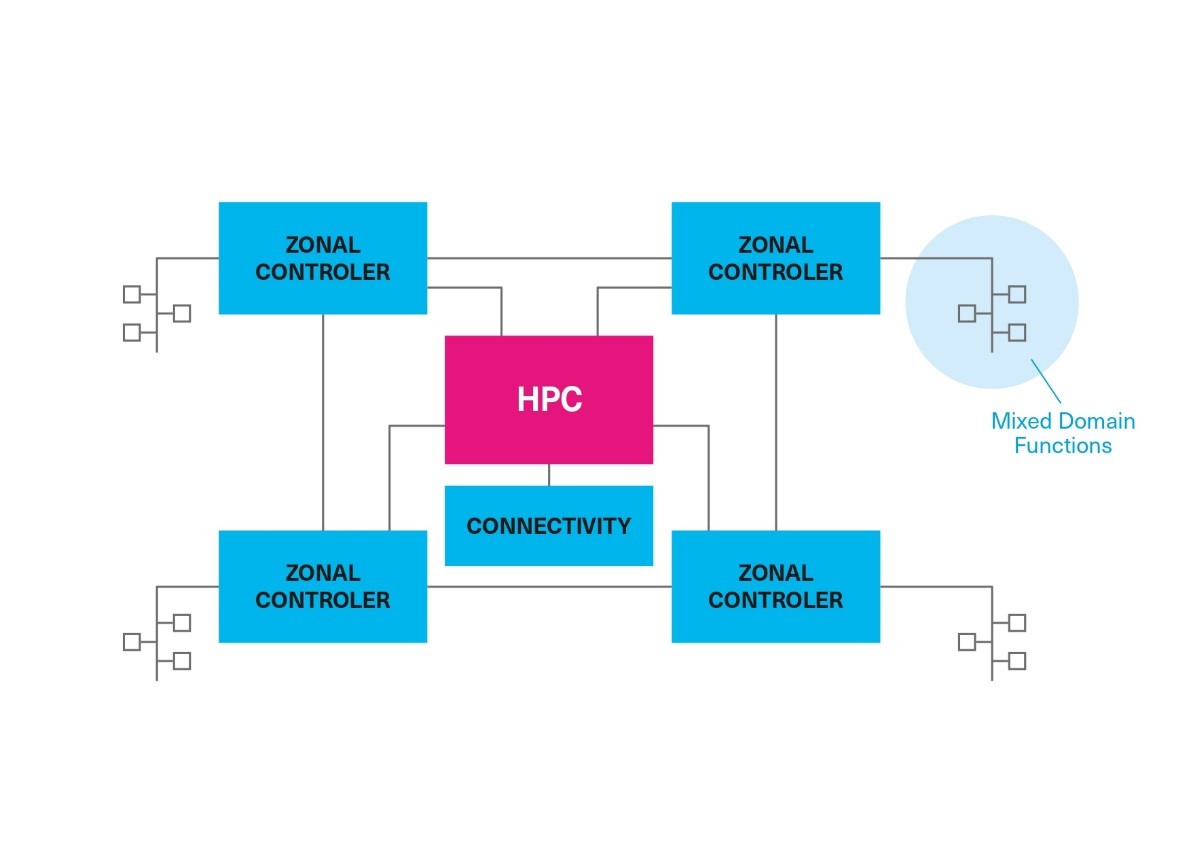
Figura 2: A diferencia de la arquitectura de dominio, la arquitectura zonal coloca las funciones de los diferentes dominios en los controladores zonales ubicados donde se implementa la función (por ejemplo, las cámaras traseras en las zonas traseras del vehículo).
Por último, tenemos el enfoque central, utilizado por aquellos fabricantes de automóviles que se esfuerzan por entregar vehículos totalmente autónomos. Los HPC son fundamentales para estos vehículos y, sin sistemas antiguos que los limiten, proporcionan total flexibilidad para el software.
Desafíos relacionados con el almacenamiento flash
Independientemente del enfoque de arquitectura E/E que se adopte, el almacenamiento de memoria flash utilizado para códigos, diagnósticos y otros datos debe adaptarse a la aplicación y a su vida útil en el vehículo. El hardware de arquitectura de dominio en desarrollo en este momento debería lanzarse al mercado en 2025. Sin embargo, las decisiones de hardware para estas plataformas se tomaron hace varios años, lo cual se refleja en la tecnología utilizada.
Por ejemplo, aunque el sector de los móviles se ha trasladado en gran medida a la tecnología flash UFS, la industria automotriz todavía está migrando del e-MMC. Para la telemática y el ADAS, los fabricantes ya están utilizando las mayores capacidades disponibles, como la memoria THGAMVT0T43BAB8 de 128 GB basada en la tecnología de memoria flash 3D BiCS FLASHTM de KIOXIA. Sin embargo, se prevé que estos sistemas requieran hasta 1 TB en la próxima generación de vehículos.
Es poco probable que el estándar JEDEC para e-MMC siga desarrollándose, dejando su velocidad máxima de transferencia a 400 MB/s frente a los 2320 MB/s de los dispositivos UFS 3.1 (figura 3). El uso de UFS 3.1 y las revisiones posteriores, como UFS 4.0, también apoyará la migración del flash 2D hacia el flash 3D para automóviles. KIOXIA lidera el camino en esta tecnología como miembro clave del equipo de JEDEC, definiendo y contribuyendo al estándar.
Además, al desarrollar su propio hardware y firmware de controlador junto con la memoria flash, es posible añadir funciones que mejoren el rendimiento de escritura (WriteBooster) y los accesos aleatorios de lectura (Host Performance Booster). Así pues, a medida que la industria automovilística vaya exigiendo más a la memoria flash, y dado que la densidad y el rendimiento están estrechamente vinculados, la solución es migrar a UFS.
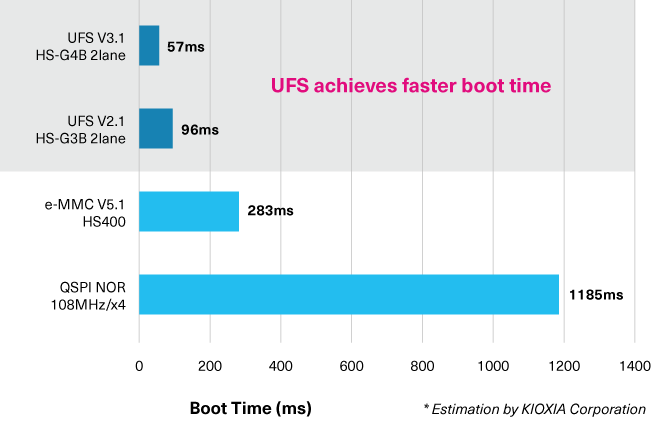
Figura 3: UFS ofrece velocidades de transferencia considerablemente más rápidas que e-MMC, lo cual permite un tiempo de arranque más rápido y sistemas integrados más receptivos. (Fuente: https://europe.kioxia.com/en-europe/business/memory/automotive.html)
Hay propuestas para aprovechar el poder de la nube y así apoyar a los vehículos con algunas de las nuevas innovaciones que se proponen. Sin embargo, estas y otras características de seguridad dependen de las redes telefónicas, como la comunicación vehículo a vehículo (V2V) y vehículo a X (V2X). A pesar del aumento del despliegue de la conectividad a Internet inalámbrica en los nuevos vehículos, gran parte de esta funcionalidad futura requiere una amplia accesibilidad a redes 5G que aún no están completamente desplegadas. Esto significa que gran parte de la tecnología que respaldará la seguridad del vehículo y las características de conducción autónoma se tendrá que realizar en la ECU.
El ancho de banda adicional ofrecido por la memoria flash administrada por UFS será crucial para estas aplicaciones, con el fin de ejecutar algoritmos rápidamente y almacenar resultados. Además, las memorias e-MMC no alcanzarán las capacidades de los dispositivos UFS. Por último, UFS es una tecnología que seguirá evolucionando y desarrollándose, al igual que las soluciones de almacenamiento que la utilizan. Si bien es cierto que el e-MMC no está obsoleto, igual que cualquier tecnología de semiconductores, la viabilidad de los procesos más antiguos disminuye con el tiempo. En la automoción, donde la longevidad del suministro es un requisito crucial, esto podría ser un desafío considerable a menos que se realice la migración a UFS (Figura 4).
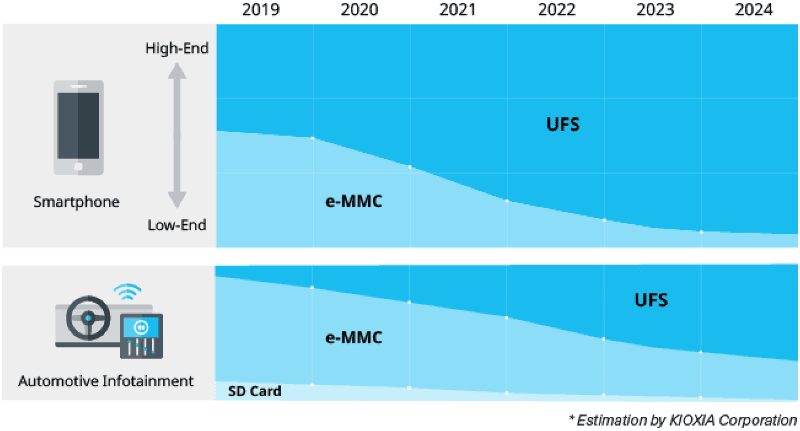
Figura 4: La automoción está migrando de e-MMC a UFS, siguiendo la tendencia en aplicaciones de consumo como los móviles. (Fuente: https://europe.kioxia.com/en-europe/business/memory/automotive.html)
La elección de la memoria flash sigue siendo una decisión de diseño esencial
El mundo del automóvil está cambiando, y rápidamente, ya que los propietarios de vehículos quieren una experiencia más cercana a la de un móvil. Para la industria automotriz, está claro que las arquitecturas E/E del pasado no cumplirán este requisito. De hecho, estas se beneficiarían de migrar a un hardware que en gran medida permanezca fijo durante muchos años y que pueda desplegarse en una gran variedad de vehículos, recurriendo al software para definir la funcionalidad implementada.
Con las arquitecturas de dominio, zonal y central en desarrollo, la elección de la memoria flash es una pieza fundamental del rompecabezas para habilitar el vehículo definido por software. Los actores del sector de los semiconductores, como KIOXIA, están superando continuamente los límites para ofrecer las mayores capacidades y rendimientos requeridos por estas aplicaciones. De cara al futuro, la tendencia en el sector automotriz será seguir reemplazando el e-MMC por el UFS, proporcionando así un rendimiento cinco veces mayor, capacidades que rompen la barrera de 1 TB y liderar la transición del flash 2D al 3D.


 a vehículos de gama media")
